Journal of Fuzzy Systems and Control, Vol. 2, No 2, 2024 |
Adaptive Fuzzy Filter Technique for Mixed Noise Removing from Sonar Images Underwater
Suad Ali Aessa 1,* , Ekbal Hussain Ali 2, Salam Waley Shneen 3, , Layla H. Abood 4
1,2 3,4 University of Technology, Baghdad - Iraq
1,2 Department of Electromechanical Engineering
3 Energy and Renewable Energies Technology Center
4 Department of Control and System Engineering
Email: 1 suad.a.aessa@uotechnology.edu.iq, 2 ekbal.h.ali@uotechnology.edu.iq, 3 salam.w.shneen@uotechnology.edu.iq,
4 layla.h.abood@uotechnology.edu.iq
*Corresponding Author
Abstract—Underwater Analysis of acquired images may be affected by low contrast, haze, and other disturbances., caused by scattering and absorption of the light through propagation. An adaptive fuzzy filter for three mixed noise reduction is adopted on underwater sonar images to take out the various noises that either appear in the image when captured or injected into the image when transmitted. Underwater images when captured usually have speckle noise, salt, pepper noise also Gaussian noise. Is suggested in this paper an adaptive fuzzy filter structure that combines the fuzzy filter, sigmoid sliding control to minimize error as possible, and mean filter to reduce three mixed noises from sonar images underwater. This technique gives the best results especially with speckle noise compared to mean filter, median filter as no adaptive filters, and fuzzy filters, frost filter as adaptive filters. The MATLAB programs are adopted to simulate the proposed system.
Keywords—Additive Noise; Impulse Noise (Salt & Pepper); Speckle Noise; Mixed Noise; Fuzzy Classical Filter; Nonlinear Filter
One of the studies that has occupied researchers in the field of wireless communications is monitoring vehicles that dive underwater, including location determination systems as well as warning systems. Among the devices that are used to achieve efficient and secure communication are wireless communication devices, and voice modems, which play an important role in ensuring communication under shallow and deep water [1]. These devices have different sound wave capabilities that vary according to the type of sonar wave, marine navigation with the carrier, and marine tracker for various systems, including military ones, searching for the result of loss, and completing the rescue operation. This type of system can be considered somewhat complex and peculiar because of the effects of propagation and reflection of audio signals, multipath, and noise, in addition to reverberations [2]. Therefore, work and focus are on how to address all obstacles to obtain accuracy and clarity from the effects processing crescent by relying on filters to remove accompanying distortions, including linear filters and others. Non-linear. Filters work to correct cases that need to remove the accompanying noise and remove damaged images [3][4]. The solution depends on the type of problem and according to the type of noise the appropriate filter is adopted. An example of linear filters is both the Mean filter and the Wiener filter that treat Gaussian noise. Nonlinear filters include both median filters and fixed order filters with edge information but are superior at eliminating sporadic and impulsive noise. The forms of noise in photos determine the strategies used to decrease it [5][6].
It is possible to obtain noise due to the movement of electrons. It is Gaussian white noise, so the sonar is mentioned above. Interference causes network instability, and some data may be lost during transmission. Therefore, addressing this requires designing a simple filter capable of removing distortions, that is, getting rid of noise while considering all surrounding environmental influences. Nonlinear filters handle a wider range of different types of noise [7]. Many researchers have presented different methods for removing noise, for example in [8] a hybrid-type filter was presented to work on canceling Gaussian and impulse noise. Researchers in [9] also presented a fuzzy-type filter to work to correct noise in grayscale images. Also, a hybrid filter was introduced in [10] as well as in [11], which was used to reduce noise for both grayscale and color images. As was done in other studies, to obtain the desired response, use a filter to remove Gaussian and finite noise. The FIR filter was introduced to filter dental X-ray images [12] to remove spots and Poisson noise, while in [13] the hybrid filter was used to remove noise from the SAR image.
The current study proposed a type called adaptive filter to treat different types of noise including salt, pepper, speckle, and Gaussian noise. The adaptive filter combines the properties of linear filters and non-linear filters, which are blurry filters that work adaptively to control the noise processing of underwater sonar images and work to purify and improve the images by filtering and passing the desired and removing the unwanted.
Noise or distortion present in images taken from a sonar device is unwanted data. After the image signal is converted from optical to electrical, digital images with noise are captured as samples [14]. When it is intended to perform, for example, image processing to analyze those images, including images of a radar device, medical device, sonar, or any other field, the process of separating unwanted signals such as distortion and noise using filtering circuits is considered to have a significant impact on the processing.
It can be said that it faces major challenges in removing noise and removing distortion. Causes of image degradation can appear due to [15]: 1- Noise: random fluctuations in signal intensity or signal interference from the electronic system of the capture device 2- Blur: contributions of out-of-focus light at the imaging plane 3- Illumination (scattering, glare). 4-Optical aberrations (spherical aberration, field curvature, line distortion).
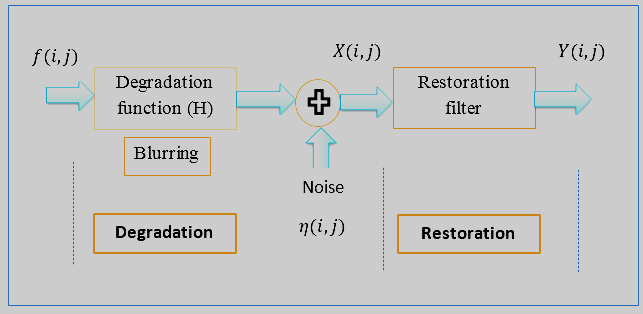
There are two types in the decomposition process model: the decomposition function and the noise function, as shown in Fig. 1. The general model in the spatial domain follows the famous statement in equation (1), [16]:
| (1) |
Where:  is the two-dimensional convolution process.
is the two-dimensional convolution process.  is the degraded image.
is the degraded image.  is the degradation function.
is the degradation function.  is the original image.
is the original image.  is the additive noise function.
is the additive noise function.
The objective is to make the output image  as close as possible to the source image
as close as possible to the source image  .The noise is assumed as uncorrelated concerning the image (no relationship between pixel and noise values), noises are normally characterized by (PDF).
.The noise is assumed as uncorrelated concerning the image (no relationship between pixel and noise values), noises are normally characterized by (PDF).
Generally, the mathematical representations for noisy images with mixed noise (Speckle noise and impulse (salt and paper) can be modeled in the following ways: Model of noisy images:
| (2) |
The following notation in the image indicates the pixel at the i-th row and j-th column: X(i,j);-speckle noise S(i,j). W(i,j) is the uncorrelated process additive white noise, and W1:- is the additive white noise with mean zero and variance Q^2. W2 represents the additive impulse noise with noise density D.
One of the treatments that is used to improve images and remove noise is to filter part of an image through appropriate and specific details that have an impact on the improvement process, such as edges. The non-linear filter is considered a suitable filter to remove impulsive noise effectively. It also works to reduce stains.
The output pixel value of the region's center position is the median intensity in the chosen region as applied by this filter [17][18]. The following formula can be used to represent the median filtering.
| (3) |
Noise varies depending on the surrounding environment, and the filters used also differ depending on the type of environment and application. For example, when it is intended to use a type of filter, which is a linear filter, an average type, or a Gaussian filter, to remove the noise of a specific type, it can be said that it is suitable for this goal, from the crescent of the response value of each pixel to the average value. Or weighted average [19]. Its area is defined by the arithmetic average determined by the pixels.
| (4) |
The fuzzy filter is a symmetrical and triangular filter through the chosen window as well as the mean and central value and is defined mathematically as follows:
| (5) |
 ;
;

Where: For each input value, the values that are the minimum, median, and maximum are as follows: x(i + r; j + s) for r, s ϵ A within the window A at discrete indexes (i,j) [20].
The fuzzy filter has the following mathematical definition:
| (6) |
It is an asymmetrical, triangular filter that passes through the selected window, mean, and central value. Equation's triangle window function is asymmetrical. The degree of asymmetry is determined by the difference between x_med (i,j)-x_min (i,j) and x_max (i,j)-x_med (i,j). The values x_min (i,j), x_max (i,j), and x_med (i,j) represent, in that order, the minimum, maximum, and median values of all the input values x(i + r; j + s) for r, s ϵ A inside the window A at discrete indexes (i,j) [20].
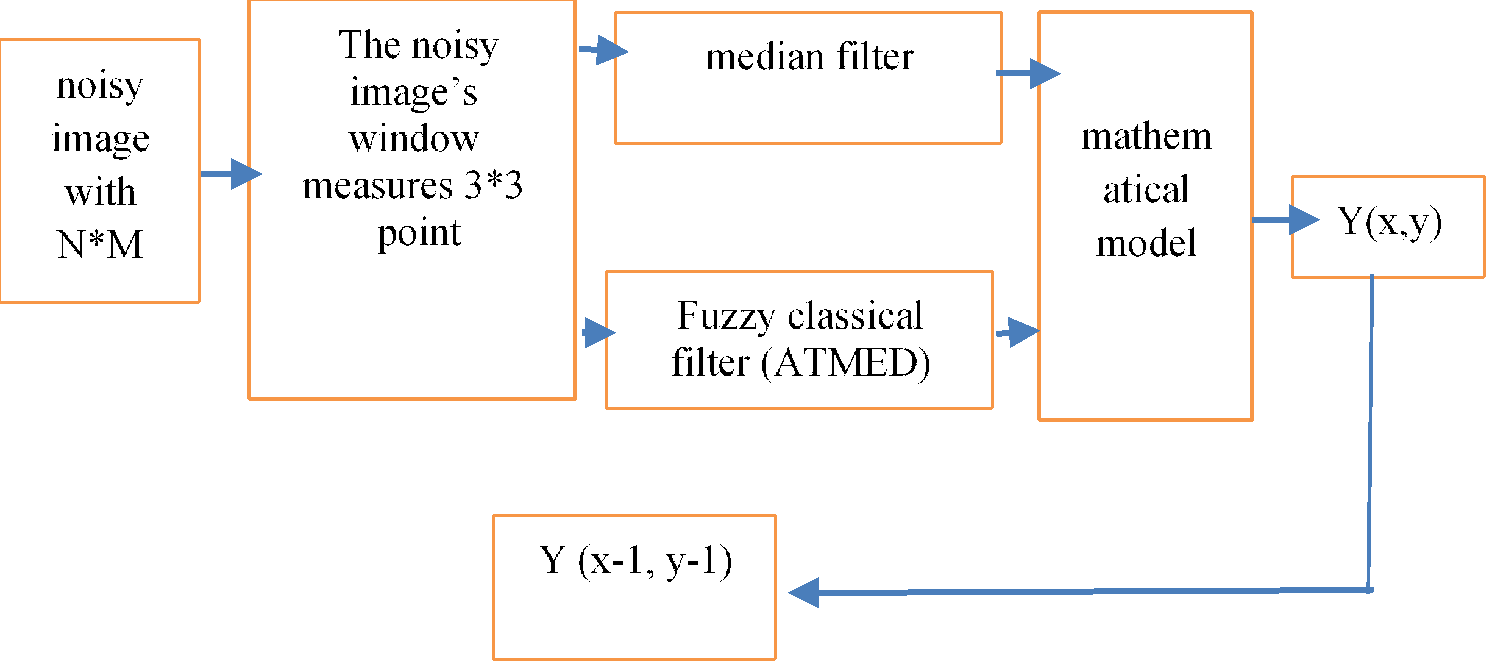
The proposed adaptive fuzzy filter is depicted in Fig. 2, which uses three mixed noise removal approaches to perform spatial filtering in a square-moving window. Mean, Fuzzy median filter (ATMED), and mean filter are used as two outputs, and their input is used to estimate the center pixel in the mathematical equation (9). The output of the mathematical model has updated (modified) the central pixel of the noisy image window size (3×3) in the recursive model. In other words, the filtering action for the next pixels would use the value of the previously filtered pixels in its calculation. The mathematical method is given by the following equation:
| (7) |
| (8) |
| (9) |
| (10) |
| (11) |
Where:  is the local Fuzzy median filter (ATMED),
is the local Fuzzy median filter (ATMED), is the image with noise. is the local average,
is the image with noise. is the local average,  is the sigmoid functions (gain),
is the sigmoid functions (gain),  is the control factors.
is the control factors.
In the studies [21]-[24] work was done to use the function for an appropriate estimate of the error relative to the gain, the target function, and the error signal, which is the so-called sigmoid function (sigmoid). Within a range between C from -1 to 1, so that if there is a high-level error, this requires the output of this function to be high within the same range, while in the other case, if the error level is small, b1 and b2 are factors that regulate the nonlinear function's output in the range of 0.1 to 0.9, which is the ideal value to eliminate three additional noises.
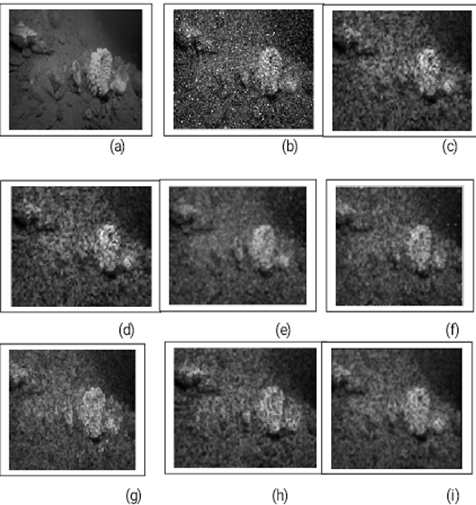
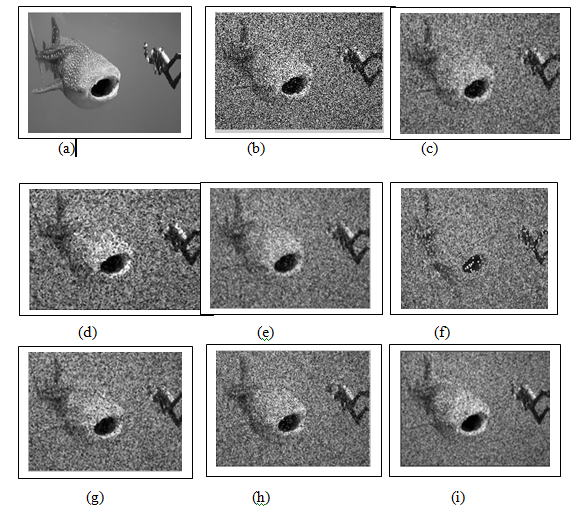
MATLAB was chosen to simulate the proposed test models for two cases of an 8-bit underwater optical sonar. First, the first one in Fig. 3(a) is image 256256 of “Underwater Image 1,” and the second, K in Fig. 4(a), is Image 320320 of “Underwater Image 2.” As we saw in Fig. 3(b) and Fig. 4(b), the simulation included images of both the image in its original version, as well as noise and double noise, distributed in a way that is uniform and average, as there is zero and variance (0.3) within the first stage of the simulation. In addition, Gaussian and salt are added Pepper has a mean of zero and variance (0.01, 0.05).
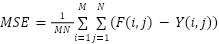
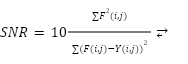
Images in Fig. 3(c) to Fig. 3(i) for underwater-image1 and Fig 4(c) to Fig. 4(i) for underwater-image2 illustrate how well the suggested filter performs when compared to the Frost, Mean, Median, Wiener, Fuzzy median filter (ATMED), and Fuzzy median filter (TMED). The following three parameters are defined and computed to quantitatively assess the performance of filters: SNR, and NMSE, and are utilized as the objective evaluation index in this paper. Its calculation process is explained in the following. The equation is [19][20].
| (12) |
| (13) |
The symbols F(i,j) and Y(i,j) represent the values of the original image and the correspondingly de-noised images. For edge preservation, the edge measure is also considered. To be more precise, [15] defined the parameter as β:
| (14) |
where: obtained using a 5x5 pixel standard approximation of the Laplace operator,  ,
,  are the derivative filter versions of F and
are the derivative filter versions of F and  , respectively, and
, respectively, and  ,
,  are the mean of the high-pass filter versions of F and respectively.
are the mean of the high-pass filter versions of F and respectively.
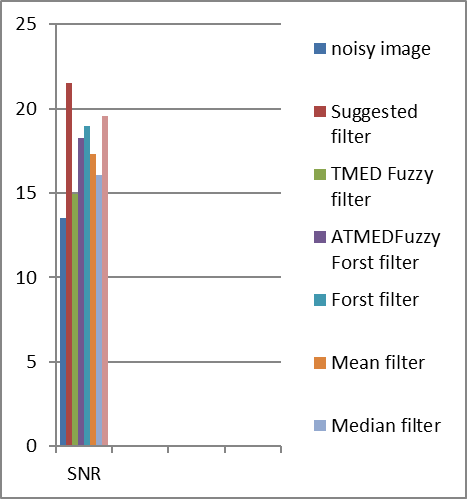
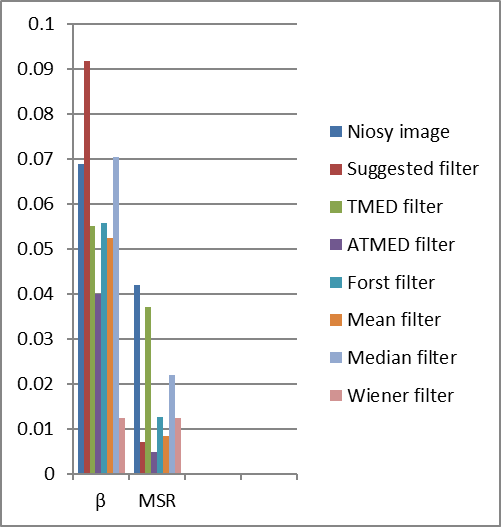
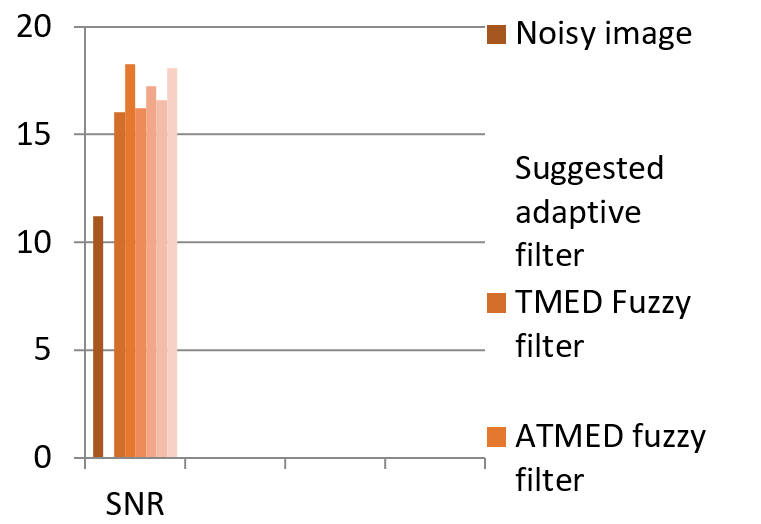
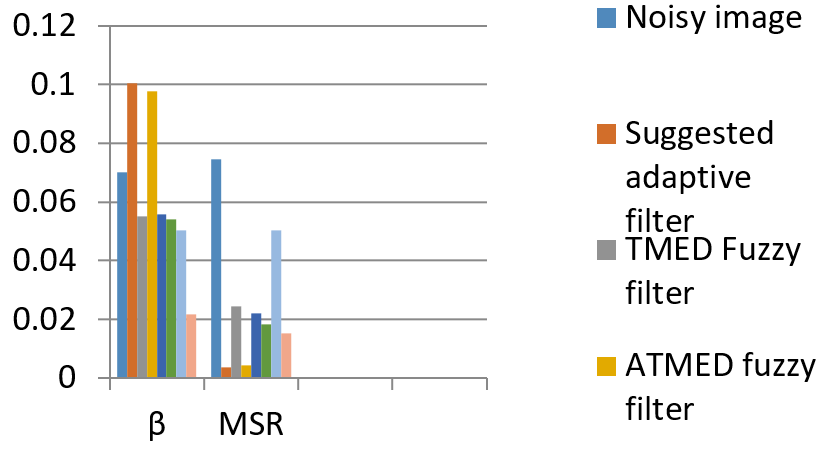
As described in detail [25], a directional filter is an edge detector that can be used to calculate the first derivatives of an image. For all adaptive fuzzy filters, including the suggested filter, a 3×3 window was used. For the entire image, the evaluation parameters MSR, SNR, and  were used. The maximum gain is estimated to be 0.5 using the control factors in the suggested fuzzy filter, which are set to b1=0.001 and b2=1.2. This is the best range value for predicting the gain to reduce three mixed noises. The quantitative findings in Fig.3 also Fig.4 provide an overview of the outcomes of the computer simulation used to de-noise. Since one type of speckle noise is the most prevalent underwater, it was added in greater amounts than the other types to underwater images 1 and image 2. The outcomes demonstrate that the suggested fuzzy filter can remove mixed noise without destroying significant image edges or distorting helpful image information. Additionally, the fuzzy filter (ATMED) produced good results, which is why it was added to the suggested system. The simulation results to de-noise the underwater images1 and image 2 with mixed noise are summarized in the quantitative results of Fig.5 and Fig.6. The results of the proposed system's testing on speckled variance are 0.1, 0.2, 0.4, and 0.6, respectively, demonstrating the successful removal of this species. The simulation results to de-noise the underwater image 1 with speckle noise only are summarized in the quantitative results of Table 1.
were used. The maximum gain is estimated to be 0.5 using the control factors in the suggested fuzzy filter, which are set to b1=0.001 and b2=1.2. This is the best range value for predicting the gain to reduce three mixed noises. The quantitative findings in Fig.3 also Fig.4 provide an overview of the outcomes of the computer simulation used to de-noise. Since one type of speckle noise is the most prevalent underwater, it was added in greater amounts than the other types to underwater images 1 and image 2. The outcomes demonstrate that the suggested fuzzy filter can remove mixed noise without destroying significant image edges or distorting helpful image information. Additionally, the fuzzy filter (ATMED) produced good results, which is why it was added to the suggested system. The simulation results to de-noise the underwater images1 and image 2 with mixed noise are summarized in the quantitative results of Fig.5 and Fig.6. The results of the proposed system's testing on speckled variance are 0.1, 0.2, 0.4, and 0.6, respectively, demonstrating the successful removal of this species. The simulation results to de-noise the underwater image 1 with speckle noise only are summarized in the quantitative results of Table 1.
(a) |
(b) |
/ and MSR comparisons of various denoising filters using 3x3 window for underwater –image1 with three mixed noise Speckle 0.3 Gau:0.01Salt&pe:0.01(a) |
(b) |
Table 1. The evaluation of the denoising filters using a 3x3 window for underwater image1 with different speckle noise level
Filters | SNR V=0.1 | SNR V=0.2 | SNR V=0.4 | SNR V=0.6 |
Noisy image | 21.0338 | 17.9865 | 15.1838 | 13.8532 |
Suggested adaptive filter | 27.0704 | 25.1153 | 23.8745 | 22.6631 |
TMED Fuzzy filter | 25.4900 | 23.6941 | 21.5109 | 20.179 |
ATMED fuzzy filter | 26.0510 | 24.8116 | 22.3520 | 21.080 |
Frost filter | 26.1106 | 23.5641 | 20.7635 | 19.4223 |
Mean filter | 26.6804 | 24.2147 | 23.0792 | 20.2280 |
Median filter | 26.0510 | 23.2772 | 20.4532 | 18.9069 |
Wiener filter | 25.9213 | 24.5231 | 20.5251 | 19.3781 |
This research proposes an adaptive filter based on the fuzzy filter with a mathematical equation to eliminate three mixed noises while maintaining edge integrity in digital underwater sonar images. A measure can be developed to determine the type and quality of filters of this type through indicators of the signal ratio and the rate of error reduction by knowing the square error, if it is low, it indicates that it is a good filter, and the ratio of the original signal to the noise. The suggested filter works well with two different kinds of underwater sonar images. An optimal speckle noise filter performs better in the underwater sonar image. According to experimental results, the recommended filter significantly outperforms other noise reduction filters in restoring the sonar underwater image.
Suad Ali Aessa, Adaptive fuzzy filter technique for Mixed Noise Removing from Sonar images underwater