Journal of Fuzzy Systems and Control, Vol. 2, No 3, 2024 |
Internet-based Control of Thermo-optical Plant Improvement based on the PID-GWO System
Salam Waley Shneen 1*, Jafaar M. Daif-Alkhasraji 2, , Mohammed Q. Sulttan 3,
1 Energy and Renewable Energies Technology Center, University of Technology, Baghdad -Iraq
2, 3 Department of Electromechanical Engineering, University of Technology, Baghdad -Iraq
Email: 1 salam.w.shneen@uotechnology.edu.iq, 2 Jaafar.M.Dhaif@uotechnology.edu.iq,3 Mohammed.Q.Mohammed@uotechnology.edu.iq
*Corresponding Author
Abstract—Experimental work systems with remote access to the laboratory are an inseparable part of engineering education at universities. Many important factors contribute to enhancing overall performance in terms of stability, reliability, and robustness. These include time responses, time delays, inverse responses, significant nonlinearities, multivariable interactions, and modeling uncertainties. This work examines four scenarios for the thermo-optical plant: open-loop PID, a close-loop system without control, a close-loop with PID controller, and a close-loop with a Proportional-Integral-Derivative (PID) controller combined with Grey Wolf Optimizer (GWO), with the goal of achieving the optimal response for a remote thermo-optical plant. The results indicate that scenario four exhibits a smaller percentage overshoot compared to the other scenarios, thereby ensuring a larger stability margin. It outperforms the other three scenarios and significantly enhances the system. The response speed demonstrates a greater percentage of improvement (74.05%).
Keywords—Thermo-optical Plant; PID Controller; GWO; Transfer Function; IATE
User demands and the Internet undergo constant evolution. The user desires interactive, adaptable, and multimedia applications. Engineering education is progressively including online interactive examples and experiments [1]-[4]. Despite facing hurdles in time, cost, and requirements, these occurrences are increasing. In addition, it is imperative that they align with educational goals and teaching approaches. They have a significant impact on the development of accessible technology. In recent years, web application development has focused on responsive design, utilizing JavaScript with HTML5 to provide drag-and-drop functionality, creating interactive client-side applications, developing single-page web apps, and designing mobile web apps that closely resemble native mobile apps. Current web design trends encompass the utilization of JavaScript and CSS. Experiments are crucial for engineering education at the university level. Experiments serve to elucidate theory and establish links between tasks and concerns. In addition, they generate, verify, and dismiss theories connected to challenges. Cartoons and simulations provide opportunities for children to engage in experimentation; nonetheless, real instruments are the optimal choice. Regrettably, these trials are not accessible around the clock. Laboratories typically operate within restricted hours. Students are required to verify the availability of the laboratory. Students are required to confirm the availability of the laboratory before visiting the institution itself [5]. Hence, the problem lies in ensuring that experiments are readily available for all students as and when required. It is feasible to conduct laboratory experiments via the Internet. With the increasing popularity of JavaScript, this work aims to decrease the response time for intricate remote-control experiments using the thermo-optical plant described in the next section.
PID algorithms are commonly used to regulate a wide range of industrial facilities. The classic PID technique is widely regarded as dependable and uncomplicated. It has been implemented in several control loops across diverse industrial facilities worldwide for the past seven decades. Although PID controllers offer numerous benefits, not all industrial processes can be effectively regulated using traditional algorithms. Complex nonlinear processes or systems with several variables necessitate the use of sophisticated control algorithms that rely on flexible and resilient techniques. Presently, most manufacturers have integrated novel sophisticated architectures rooted in soft methodologies into their control systems. Users can utilize fuzzy logic, neural network algorithms, and genetic algorithms to enhance existing control loops and control structures. The primary objective is to attain superior control loop performance in comparison to traditional PID algorithms [6][7]. All previous works used different methods, and different approaches differ from the method of this work. The GWO algorithm will be used to improve the optical planet base PID control in this paper, and integral time absolute error (ITAE) will be added as a fitness function. Two scenarios were investigated: open and closed loops applied with and without PID controller, aiming to attain system robustness and decrease the optical planet system. The study [8] presented a novel intelligent optimization approach in 2014. The feasibility and verification of the procedure were assessed using criterion measurement and validated through many field scientific implementations in the following years. The communal hunting technique of the grey wolf’s prey is an exemplar of a behavioral pattern in a specific ecosystem that has inspired the rationale behind this algorithm. The GWO method has garnered significant interest among researchers due to its simple, flexible, extremely resilient, and rapidly converging process, making it a dependable alternative to classical optimization. In addition, it requires fewer parameters for configuration, has a smaller footprint compared to other evolutionary methods, and has a rapid computational process [9][10].
The work [11] demonstrated electromechanical channel description and control. A cost-effective laboratory-scale model of a thermo-opto-mechanical system was given for hands-on and remote testing and control difficulties. These studies show that nonlinear channel dynamics can be used to demonstrate how model-based design can meet plant model requirements. This predictive disturbance observer-based filtered proportional-integral (PI) control approach optimizes input and output transient response morphologies. This is done by changing the fundamental P control and reconstructing input disturbance transients. Thus, the study developed an active experimentation-based learning scenario for advanced learning outcomes. Expository learning, testing, and arguments enriched this technique. The paper proposed and tested a self-tuning fuzzy PID controller design technique for thermo-optical plants. Fuzzy logic adjusted PID controller parameters. Heat-optical plant control is tested with the proposed controller. Additionally, this work covers theoretical and practical approaches for effective control design and execution [12]. In addition, [13] discussed web-based thermo-optical plant control implementation. Plant control was done using the open-source Modelica-based modeling and simulation platform, which was not designed for online applications. The study suggested overcoming this restriction.
In addition, the study presented in [14] showcased the ability to remotely regulate the thermo-optical plant in an educational laboratory. Despite previous attempts to solve this issue, the continuous emergence of new technology necessitates a continual shift in the approach to remote studies. In this instance, the entire program, encompassing both the client and server components, was developed using JavaScript and the Node.js library. The research presented in [15] showcased the ability to remotely control a thermoelectric plant using an Android-based mobile application. It was demonstrated that the user has the ability to conduct the experiment either in an open or closed loop. In addition, plant control is achieved by a pre-established PID controller, allowing for the modification of its parameters. Furthermore, an alternative option is to employ a personalized controller, where the control algorithm must be specified using the syntax of the SciLab environment that operates in the background of the entire experiment.
The development of micro and nano metrology is necessary to ensure the high quality of small components by using precise positioning stages. PID control has been demonstrated to possess the highest level of resilience and simpler operational performance. Nevertheless, it is really necessary to adjust the essential parameters of a PID controller in order to construct a resilient controller that can produce precise positioning performance.
Consequently, numerous tuning approaches have been suggested for PID controllers. In a study conducted by [16], three tuning approaches for PID control of a single axis of the XY stage of a 3D surface profiler were examined. These methods included the Ziegler- Nichols step response method, the Chien-Hrones-Reswick method, and the Cohen-Coon method. Positional errors were quantified using a tiny plane mirror interferometer. The Cohen-Coon method was determined to be the optimal methodology for minimizing controller error.
However, most research to date has focused on making remote control of experiments as easy as possible, rather than considering factors such as time response, time delays, inverse responses, significant nonlinearities, multivariable interaction, and modeling uncertainties as significant factors in enhancing overall performance in terms of stability, reliability, and high robustness systems. This study seeks to reduce response time for complex remote control experiments utilizing the thermo-optical plant, in light of the growing prevalence of JavaScript.
The remainder of the paper is structured as follows: A section is allocated to present the PID controller, while the next section shows the GWO algorithm and the ITAE method illustrated in the next section. Section Methodology outlines the methodology adopted in this work. Simulation results and discussion are illustrated in the section Simulation Results and Discussions and the conclusion is noted in the section Conclusion.
The most straightforward and attractive solution for industrial control design implementation is the Proportional-Integralderivative or PID controller. Such a controller has an uncomplicated configuration and vigorous efficiency, in addition to its competitive price and low maintenance expenses. Furthermore, through perfect parameter tuning, the dynamic response of the system could be improved by reducing the overshoot and/or steady-state error and consequently enhancing the system’s stability [17][18].
The purpose of tuning the PID controller is to ascertain its proportional, integral, and derivative factors that are appropriate to the design to guarantee the closed-loop scheme implementation besides the strong arrangement of the control loop over a broad spectrum of functions [19]. It is worth mentioning that it is hard to adjust the PID controller without expertise. Also, the optimum adjustment could be easy for the expert manually in contrast to the amateurs because of the long time-consuming needed to obtain ideal operation outcomes. It might not be operated in the ideal case. In this regard, every factor in the PID controller could produce different outcomes. For instance, in the event of adjusting to obtain a more satisfactory transient response of the design, the model response under disruption circumstances might be delayed [17][18]. In terms of mathematical form, such a controller for SISO, it can be expressed mathematically in the time domain as [20][21].
Where  ,
,  , and
, and  represent proportion gain factor, integral gain factor, and derivative gain, respectively, while e stands for error and t denotes simultaneous time. In the s-domain, the transfer function of Equation (1) takes the form of Equation (2) [22].
represent proportion gain factor, integral gain factor, and derivative gain, respectively, while e stands for error and t denotes simultaneous time. In the s-domain, the transfer function of Equation (1) takes the form of Equation (2) [22].
| (1) |
| (2) |
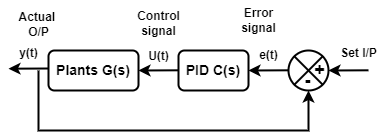
where E (s) and U (s) represent the error signal and control signal applied to the plant model, respectively. The block diagram of a closed-loop PID system is shown in Fig. 1.
The GWO, or Grey Wolf Optimizer, is a significant optimization tool used in meta-heuristics. The principle of this simulation is to replicate the behavior of gray wolves in their natural habitat, where they collaboratively pursue their prey. It is distinguished from other techniques by its unique model structure and has superior performance in identifying the optimal design of nonlinear double-layer grids. The mathematical formulation of the GWO method is described in [23].
Let’s define the original high-order system (HOS) as a transfer function with a fourth-order, as expressed in equation (3).
| (3) |
Where a and b represent predetermined scalar constants. The model, after decreasing the order to the "n-th" order, is
expressed as equation (4):
| (4) |
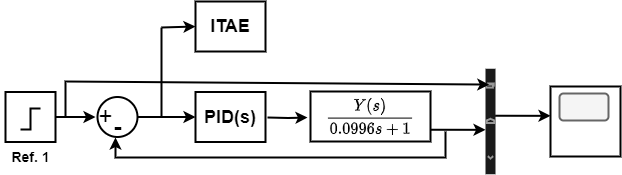
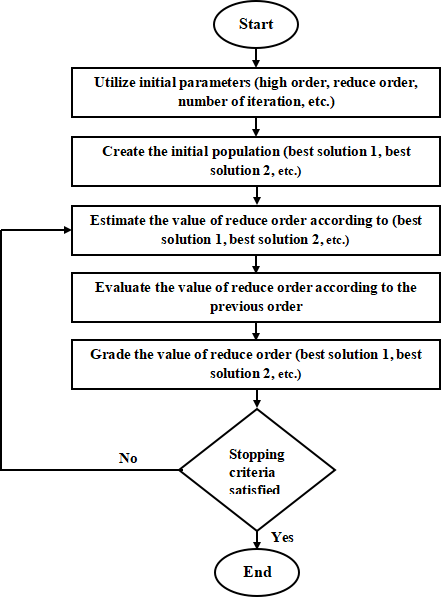
The reduced-order response can be obtained from the original HOS response by utilizing the fitness function (ITAE) as defined in equation (5) and the PID controller. The block diagram of the reduced-order model of the system is depicted in Fig. 2. Currently, the GWO algorithm begins the process of selecting the optimal solution. This involves choosing a system model with a lower order, as expressed in equation (4), which is depicted in Fig. 3. Furthermore, the function of the GWO algorithm is demonstrated in the flowchart of the GWO algorithm depicted in Fig. 3.
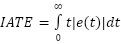
Performance evaluation methods are frequently used to characterize the results of a PID controller to efficiently design a model that meets the desired specifications [24]-[27]. Various fitness functions or implementation indices, such as integral absolute error (IAE), Integral Square Error (ISE),, integral square time absolute error (ISTAE), and integral time absolute error (ITAE), were utilized to examine their performance. The ITAE approach is used in this study to assess the performance and robustness of the system. This technique exhibits desirable characteristics, including satisfactory damped oscillation and a relatively low overshoot value. Equation (5) establishes this method, whereas Fig. 2 displays the block diagram.
| (5) |
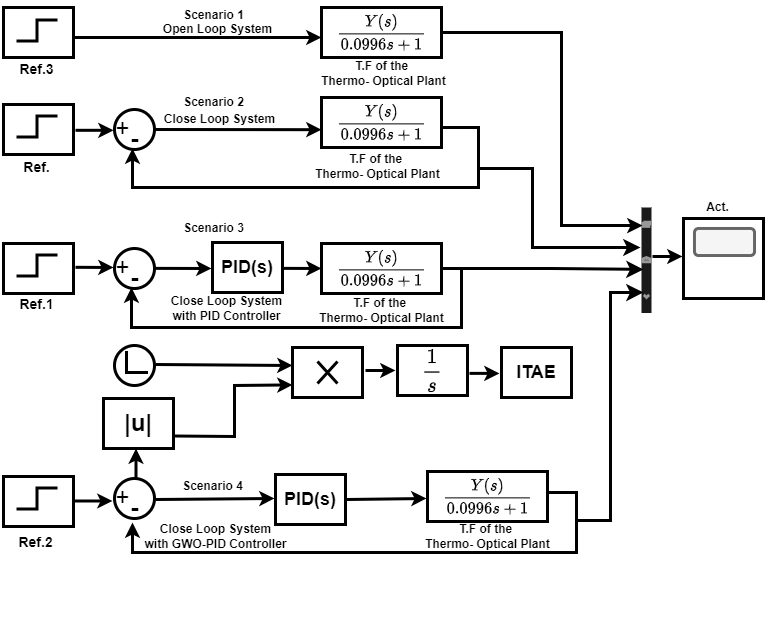
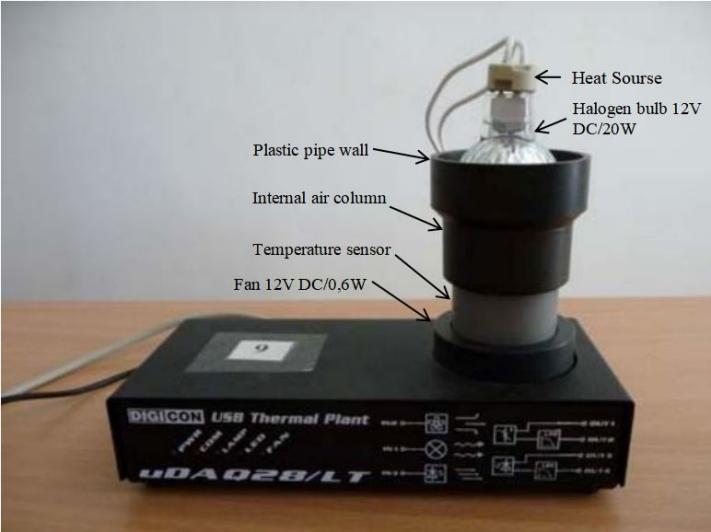
This section provided a thorough explanation of the methods for all possible situations, using the general block diagram depicted in Fig. 4. The thermo-optical plant is a laboratory model that represents the thermodynamic and optical system called the DIGICON USB thermo-optical plant, as depicted in Fig. 5. A single heating element electric bulb and a single cooling element a small fan make up the thermal channel. This channel offers temperature measurements within the tube. Where a thermal sensor is employed to quantify the output value. In this scenario, it is possible to generate light using an LED and measure its intensity using a photo-resistor. The optical channel is preferred for conducting experiments because of its greatly reduced time constants compared to the thermal channel and the model’s basis also includes the electronic component. This part includes one input connector for electricity and two extra connectors for data transmission. The data acquisition card AD512 communicates with one of these ports, and a USB port directly connects to the computer, eliminating the need for an expensive data acquisition card. On its front panel, the base has a total of five information LEDs. The electronic component’s structure incorporates integrated circuits that enable communication and signal conversion [28].
This unit is very appropriate for all educational processes due to its ease of use and excellent portability. It can be linked to the control computer over a USB interface, and no specialized A/D card is necessary. It facilitates the regulation of two physical parameters: the temperature within a plastic cylinder and the intensity of a light source. The system comprises three inputs: the bulb voltage (serving as the heat and light source), the ventilator voltage (for system cooling), and the light diode voltage. The integrated derivative filter includes two parameter inputs for modifying the sample period and the time constant. The user possesses access to eight quantified outputs: the PT100 sensor's measurement of system temperature, light intensity and its derivative, ambient temperature, current, and ventilator rotational speed.
Fig. 4 shows the three closed-loop scenarios. For example, scenario 2 depicts a closed loop, scenario 3 depicts a closed loop with a PID controller, and scenario 4 depicts a closed loop with a PID controller with GWO in addition to the ITAE function. In this case, a unit-step signal excited all four schemes, and the next section presents the output for each scenario.
As it is well known, closed-loop schemes are communally evaluated based on, to name just a few, resilience, preciseness, reliability, and steady-state transition responses. In this vein, modern technologies demand extra-advanced performance criteria. Therefore, the time at which the error occurred must be considered. Such an issue has been widely explained in publications.
Concerning the system’s dynamics, this work has taken into consideration a remarkable performance criterion called the Integrated-Time-Absolute Error (ITAE) standard. Such an index is commonly adopted since it has higher selectivity compared to the other methods, wherein it is less concentrated on the initial error with a priority given to the system error.
It is worth highlighting the fact this work was conducted based on simulation and Simulink models using Matlab 2018b. In this vein, the simulation model was devoted to carrying out the transfer function (T.F.), the GWO algorithm, and the remarkable performance criterion (ITAE) by codes of the M-file type. While the PID controller was implemented using the Simulink model.
This section will present and discuss the simulation results. To accomplish this, we will discuss the results based on four scenarios, as illustrated in Table 1.
Scenario (Close Loop) | |||
Without Control | PID controller | GWO-PID | |
Rise Time | 31.19 m sec. | 85.564 m sec. | 10.517 m sec. |
Overshoot | 0.498% | 7.86% | 0.307% |
Undershoot | 1.335% | 0.996% | 1.263% |
The controller design must strike a balance between response speed and stability, so the results will be based on the system’s speed response and relative stability; as a result, scenario four (WOG-PID) is quicker in terms of response than the other two scenarios due to its shorter rise time compared to the other two scenarios. On the other hand, in terms of relative stability, scenario three exhibits a smaller percentage overshoot compared to the other scenarios, thereby ensuring a larger stability margin. From the previous scenario, we can conclude that the fourth scenario outperformed the other two and significantly enhanced the system. The response speed shows a higher enhancement value according to Table 1 (85.564 - 31.19 = 54.374) between scenarios 3 and 2, and (85.564 - 10.517 = 75.047) between scenarios 4 and 3, when we add the GWO to the system. Therefore, such an improvement can significantly enhance experimental work with remote access to the laboratory, particularly in terms of time response, time delays, inverse responses, significant nonlinearities, multivariable interaction, and modeling uncertainties. These factors significantly enhance overall performance in terms of stability, reliability, and high robustness for the thermo-optical plant.
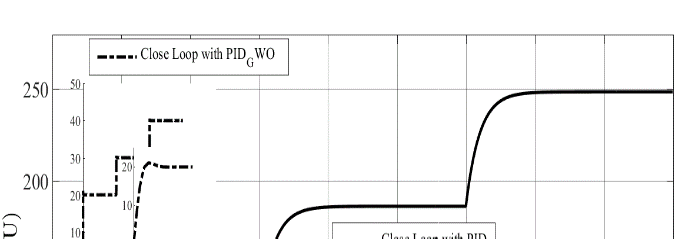
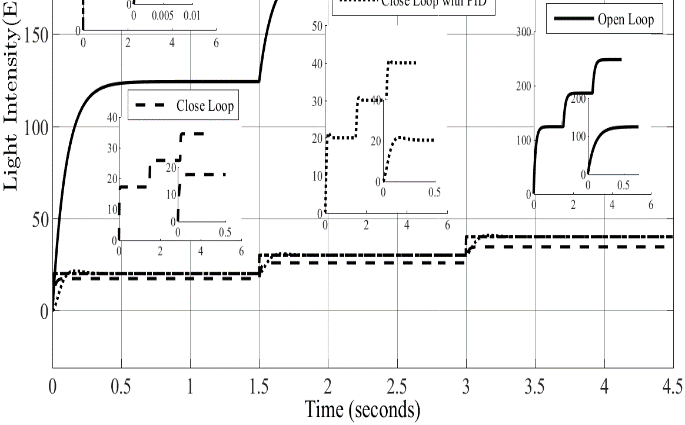
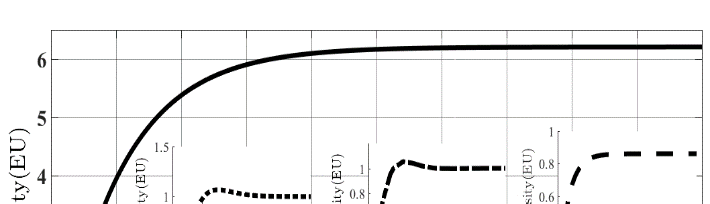
The simulation results indicate an operating period of 4.5 seconds divided into three equal periods of one and a half seconds for each case, as shown in Fig. 6 under the title Fig. 6. Performance of Non-Liner for Open-loop system and three schemes of closed loop system, and its results as shown in Table 1. The results of the linear system case indicate a single operating condition and a time period of one second as shown in Fig. 7.
Remote access to the laboratory is an integral component of engineering education at universities, facilitated by experimental work systems. Several crucial variables were implemented to improve overall performance in terms of stability, dependability, and robustness. The factors that are included are temporal responses, time delays, inverse responses, major nonlinearities, multivariable interactions, and modeling uncertainties. The thermo-optical plant was analyzed using four different scenarios: open-loop PID, close-loop, close-loop with PID controller, and close-loop with PID controller paired with GWO. The objective was to determine the appropriate response for a distant thermos-optical plant. Scenario 3 demonstrated a lower percentage overshoot in comparison to the previous scenarios, resulting in a greater stability margin. It surpasses the other two scenarios and greatly improves the system. The response speed has increased significantly (75.05%).
Salam Waley Shneen, Internet-based Control of Thermo-optical Plant Improvement based on the PID-GWO System