Journal of Fuzzy Systems and Control, Vol. 1, No 1, 2023 |
|
PID Control of Magnetic Levitation (Maglev) System
Muhammad Arif Seto 1, Alfian Ma’arif 2*
1, 2 Department of Electrical Engineering, Universitas Ahmad Dahlan, Yogyakarta, Indonesia
Email: 2 alfianmaarif@ee.uad.ac.id
*Corresponding Author
Abstract— Magnetic levitation is a process of drifting or shifting an object with a certain reference, by creating a repulsive force from the gravity of an object caused by an electromagnetic field without noise. In modern times like today, with the density of community activities, especially those living in urban areas, it is necessary to be able to carry out activities efficiently as well as quickly. Therefore, the reason for many people to be able to find an innovative solution to make it easier for humans to carry out their activities. One of the innovations that can be a solution to the limited space and time is in the development of magnetic levitation technology. The system that will be used in controlling this maglev is to use a PID controller. Using this PID control will be tested with several  ,
,  , and
, and  values with a setpoint of 950. At the initial tunning with the values =2, =0.01, and =2. Then in the second test using the values =3, =0.1, and =0.3. Software testing is also carried out using matlab. The exact PID value for controlling an elevated object can be found by changing the value of the , , and values that can be searched through a matlab software in the PID tunner feature, which can then be seen the PID tunning results by analyzing the graph that will be displayed by the PID tunner.
values with a setpoint of 950. At the initial tunning with the values =2, =0.01, and =2. Then in the second test using the values =3, =0.1, and =0.3. Software testing is also carried out using matlab. The exact PID value for controlling an elevated object can be found by changing the value of the , , and values that can be searched through a matlab software in the PID tunner feature, which can then be seen the PID tunning results by analyzing the graph that will be displayed by the PID tunner.
Keywords— Sensor; Controller; Actuators; Robot.
Introduction
In this modern era, in the midst of dense community activities, especially in urban areas, it requires people to move and do activities quickly and effectively. The demands of work, family responsibilities, and other human activities make people seem to be hunted by time. Time and space seem to be a barrier in carrying out the density of activities in this super-fast era. This is the reason for many people to find new technological innovations that aim to make it easier for humans to carry out their activities. Tools in the industrial field and also transformation have also used magnetic levitation as a solution to make it easier for a system to operate. The definition of magnetic levitation itself is the process of lifting or shifting an object at a certain reference, without any noise, by creating a gravitational repulsive force of the object by using a magnetic field as an antidote [1][2][3].
Magnetic levitation systems are modern technologies that can float an object by means of electromagnetic force [4]. This system has many applications such as maglev trains that can reach speeds of 600 km/h. The research was conducted by examining the mechanism and working of levitation magnets on superfast trains that are being developed in several countries in the world, especially in Japan. This study explains how a levitation magnetic system can be applied to trains to accelerate the pace of these trains [5]. Also how electromagnetic suspension and electrodynamic suspension are used in the train rate process as well as in the train braking process [6].
The use of magnetic levitation is as a reduction in the friction force of components that are mechanically operating which causes noise to become noisy [7][8]. So that it can further optimize the work of the system itself because the friction force generated has been reduced. Some examples are, the presence of magnetic bearings on the turbine shaft of a power plant, and magnetic suspension.
This research discusses a magnetic levitation system, which will require many experiments. Maglev control will be decisive in conducting research related to this system [9][10]. In this system, a position control system of an elevated object will be designed at a certain height under an electromagnetic field generated from a voltage-fed coil [11]. The problem in the maglev system is controlling the object so that it can float in a certain position without hitting a clumber or falling. This problem can be solved by using the PID controller.
Method
Magnetic Levitation System Modeling
The model of the magnetic levitation system in the form of a mobile function can be written as [12]

| (1) |
PID Controller
This study designed a system used to control the handling of an object controlled by a system called magnetic levitation. This system uses infrared sensors and photodiode sensors which have a function as a detector for an object [13][14]. If an object is detected by a sensor at a certain height, the sensor will send analog data to be processed whether at that height it meets the set setpoint and the process can be shown on Fig. 1.
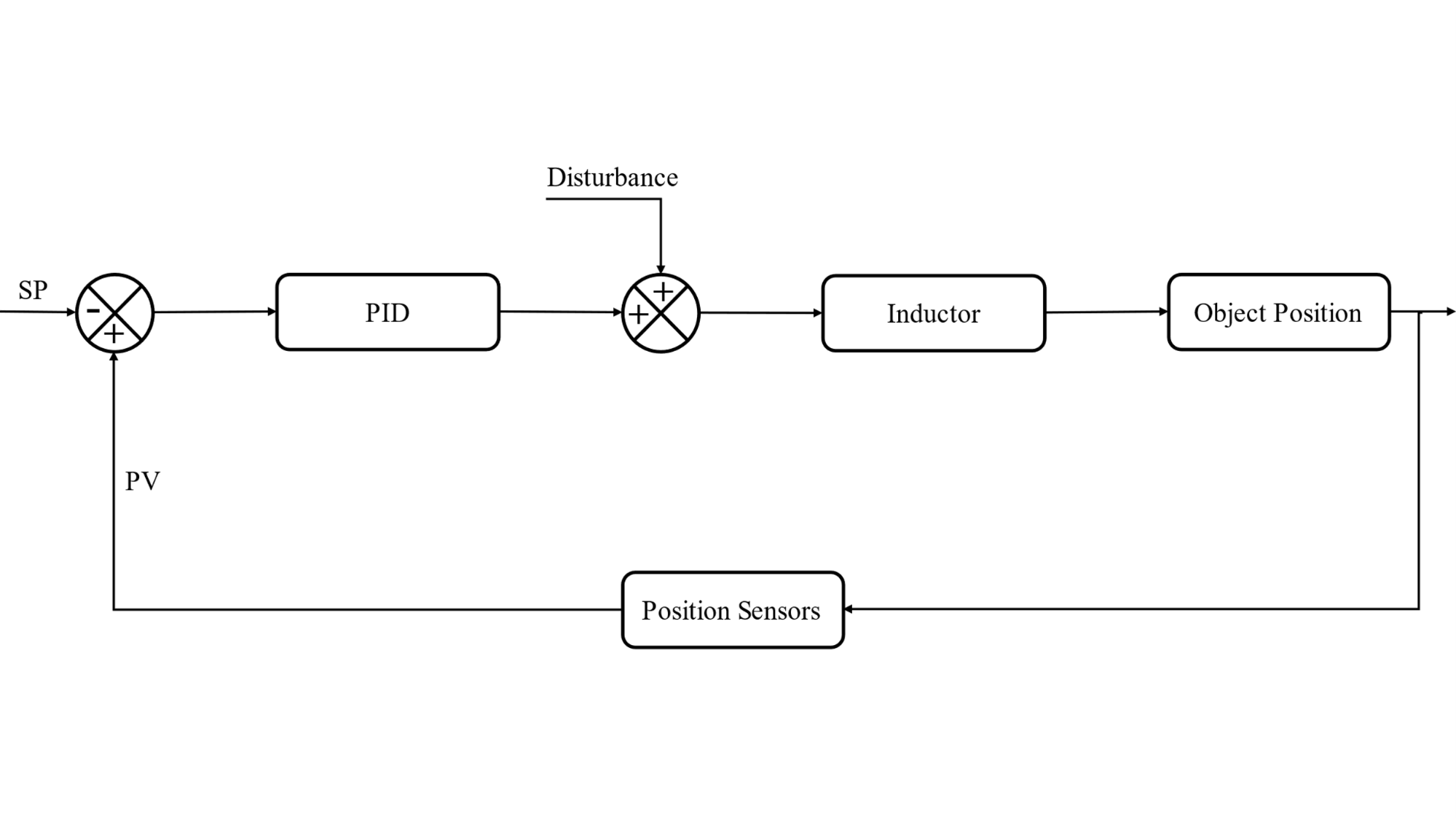
Fig. 1. The proposed method
The PID controller equation can be written as [15]

| (2) |
Where:
 : Control signal
: Control signal
 : Proporsional constant
: Proporsional constant
 : Integral constant
: Integral constant
 : Derivatif constant
: Derivatif constant
 : Error signal
: Error signal
System Block Diagram
The system block diagram of this design is arranged from several parts. This part consists of input, processing, and also output parts. In this input section, it uses a position sensor in the form of an infrared sensor and also a photodiode sensor [16]. In the process section, arduino uno and also motor drivers are used in charge of processing voltage and also the control program created [17]. In the output section used is an inductor/coil that functions as an electromagnetic field generator to float a kite object used [18]. The block diagram of this system can be seen on Fig. 2.
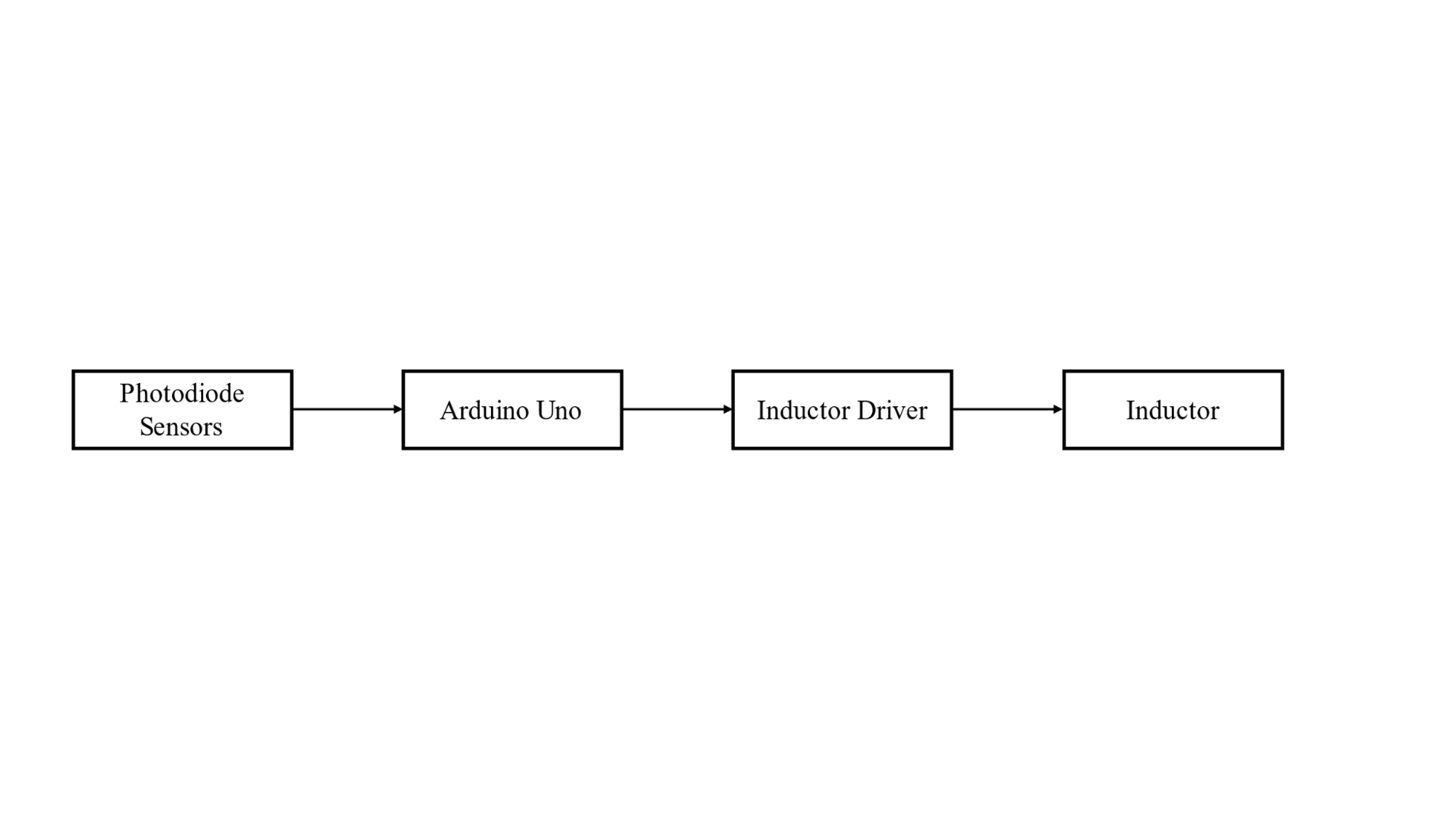
Fig. 2. System Block Diagram
Results and Discussion
Matlab Simulation Testing
In the software testing process of this maglev system, one formula will be used as a model of the transfer function [19]. Here is the model formula of the transfer function PID of the maglev system:

| (3) |
Equation (3) model is used as a transfer function model to look up values from KP, KI, and KD [20]. From the results that appear will produce a graph. The resulting graph will be analyzed to see the value of rise time, settling time, over shoot, and also steady state error that appears. Matlab simulation test results are shown on Fig. 3. The full test results are shown in Table 1.
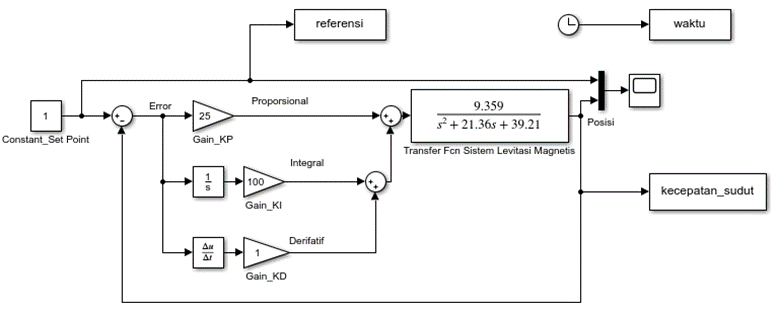




Fig. 3. System Block Diagram
- Full Test Results
No | PID value | System Response |
KP Value | KI Value | KD Value | Rise Time | SettlingTime | Over shoot | Steady State Error |
1 | 30 | 50 | 1 | 0.1582 | 0.5631 | 2.7612 | 8.8017e-06 |
2 | 40 | 50 | 1 | 0.1224 | 0.1850 | 1.6586 | 1.3443e-05 |
3 | 25 | 75 | 1 | 0.1590 | 0.9325 | 11.3975 | 1.5518e-10 |
4 | 25 | 100 | 1 | 0.1443 | 0.7997 | 17.1153 | 3.8392e-13 |
5 | 25 | 50 | 1 | 0.1822 | 0.9450 | 4.8685 | 2.3223e-06 |
Hardware Testing
In the implementation of this study, a tool of the magnetic levitation system has been designed which can be seen in Fig 4.
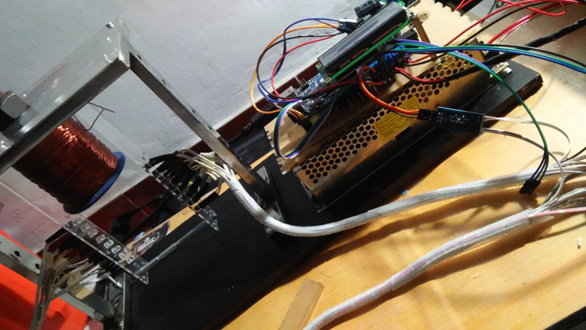
Fig. 4. Maglev Tool Design
In testing this sensor, several test values of 5 photodiode sensors and an IR sensor will be carried out. The photodiode sensor will be divided into sensor 1, sensor 2, sensor 3, sensor 4 and sensor 5. Sensor Test results are shown in Table II.
- Sensor test results
Name | Value | Information |
Sensor 1 | 660 | Detect |
Sensor 2 | 683 | Detect |
Sensor 3 | 772 | Detect |
Sensor 4 | 773 | Detect |
Sensor 5 | 736 | Detect |
All sensor | 1022 | Detect |
All sensor | 632 | Detect |
In this design the sensor is placed on both sides. The right side is an infrared sensor that has a total of 1 piece. Then on the opposite side there are 5 photodiode sensors facing each other with infrared sensors.
In this inductor, a wire winding with a magnitude of 0.7 mm is carried out which is twisted on a cylindrical bobbin with a length of 7.5 cm and has a diameter of 6 cm. The manufacture of this inductor is carried out by winding the wire up to 2510 coil.

| (1) |
Note: N = 2510 Coil
l = 7.5 cm =  .5 × 10-2
.5 × 10-2
A = 6 cm2 = 6 × 10-4
µ0 = 4π × 10-7
Question: L ….?
Answer:






At this stage of testing motor drivers, a voltage value test is carried out that arises from the predetermined PWM values, namely 50, 100, 150, 200, and 250. This test is carried out using a program on the Arduino IDE software that will be run. Then after that the maglev system will be measured using a multimeter. Motor Driver and PWM Test Results are shown in Table III.
- Motor Driver and PWM Test Result
PWM Value | Voltage Value (V) |
0 | 0 V |
50 | 4.77 |
100 | 9.59 V |
150 | 14.26 V |
200 | 18.92 V |
255 | - V
|
Conclusion
This study contains the control of PID in the magnetic levitation system. Based on the results of system simulation testing, the best PID control values were =40, =50, =1 with system response. In the hardware test, the results of the analysis were obtained with rise time = 0.1224, settling time = 0.1850, overshoot = 1.6586, and steady state error = 1.3443e-05.
References
[1] | G. Pittiglio et al., "Magnetic Levitation for Soft-Tethered Capsule Colonoscopy Actuated with a Single Permanent Magnet: A Dynamic Control Approach," in IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1224-1231, 2019, https://doi.org/10.1109/LRA.2019.2894907. |
[2] | P. Carneiro, M. P. S. dos Santos, A. Rodrigues, J. A. Ferreira, J. A. Simões, A. T. Marques, and A. L. KholKin, “Electromagnetic energy harvesting using magnetic levitation architectures: A review,” Applied Energy, vol. 260, p. 114191, 2020, https://doi.org/10.1016/j.apenergy.2019.114191. |
[3] | J. Wang and L. Yu, "Adaptive Resonant-EIDO-Based Optimized Position Precision Control for Magnetic Levitation System," in IEEE Transactions on Industrial Electronics, vol. 70, no. 5, pp. 5013-5023, 2023, https://doi.org/10.1109/TIE.2022.3186348. |
[4] | F. Lamablawa, and S. Aritonang, “Application of Magnetic Force to Means of Transportation Magnetic Levitation High-speed Railway,” AJIRSS: Asian Journal of Innovative Research in Social Science, vol. 1, no. 2, pp. 68-73, 2022, https://doi.org/10.53866/ajirss.v1i2.94. |
[5] | Z. Qadir, A. Munir, T. Ashfaq, H. S. Munawar, M. A. Khan, and K. Le, “A prototype of an energy-efficient MAGLEV train: A step towards cleaner train transport,” Cleaner Engineering and Technology, vol. 4, p. 100217, 2021, https://doi.org/10.1016/j.clet.2021.100217. |
[6] | Q. Ge et al., "3-D Electromagnetic Force Characteristics and Modeling of Double-Sided Air-Cored Superconducting Linear Synchronous Motor for EDS Train," in IEEE Transactions on Transportation Electrification, vol. 8, no. 3, pp. 3411-3426, 2022, https://doi.org/10.1109/TTE.2022.3157027. |
[7] | J. Ding, et al., “An active geophone with an adjustable electromagnetic negative stiffness for low-frequency vibration measurement,” Mechanical Systems and Signal Processing, vol. 178, p. 109207, 2022, https://doi.org/10.1016/j.ymssp.2022.109207. |
[8] | R. Krüger, B. Bergmann, and B. Denkena, “Electromagnetic ultra-precision linear guide,” Ultra-precision High Performance Cutting: Report of DFG Research Unit FOR 1845, pp. 75-106, 2022, https://doi.org/10.1007/978-3-030-83765-5_4. |
[9] | Y. Feng, C. Zhao, D. Wu, H. Xie, and L. Tong, “Effect of levitation gap feedback time delay on the EMS maglev vehicle system dynamic response,” Nonlinear Dynamics, pp. 1-20, 2023, https://doi.org/10.1007/s11071-022-08225-5. |
[10] | F. Guo, F. Hu, S. Wu, F. He, J. Liu, and X. Wu, “System dynamics in structural strength and vibration fatigue life assessment of the swing bar for high‐speed maglev train,” International Journal of Mechanical System Dynamics, vol. 2, no. 2, pp. 178-189, 2022, https://doi.org/10.1002/msd2.12045. |
[11] | J. Paredes, B. Prieto, M. Satrústegui, I. Elósegui and P. González, "Improving the Performance of a 1-MW Induction Machine by Optimally Shifting From a Three-Phase to a Six-Phase Machine Design by Rearranging the Coil Connections," in IEEE Transactions on Industrial Electronics, vol. 68, no. 2, pp. 1035-1045, Feb. 2021, https://doi.org/10.1109/TIE.2020.2969099. |
[12] | M. Urbanczyk, A. Zbinden, S. L. Layland, G. Duffy, and K. Schenke-Layland, “Controlled heterotypic pseudo-islet assembly of human β-cells and human umbilical vein endothelial cells using magnetic levitation,” Tissue Engineering Part A, vol. 26, no. 7-8, pp. 387-399, 2020, https://doi.org/10.1089/ten.tea.2019.0158. |
[13] | Iswanto, M. S. Masnawan, N. Maharani Raharja and A. Ma’arif, "Infusion Liquid Level Detection Tool Using IR Sensors and Photodiode Based on Microcontroller," 2020 2nd International Conference on Industrial Electrical and Electronics (ICIEE), pp. 70-73, 2020, https://doi.org/10.1109/ICIEE49813.2020.9277363. |
[14] | X. Tang, M. M. Ackerman, M. Chen, and P. Guyot-Sionnest, “Dual-band infrared imaging using stacked colloidal quantum dot photodiodes,” Nature photonics, vol. 13, no. 4, pp. 277-282, 2019, https://doi.org/10.1038/s41566-019-0362-1. |
[15] | J. Zhang and L. Guo, "Theory and Design of PID Controller for Nonlinear Uncertain Systems," in IEEE Control Systems Letters, vol. 3, no. 3, pp. 643-648, 2019, https://doi.org/10.1109/LCSYS.2019.2915306 . |
[16] | D. Laurijssen, W. Saeys, S. Truijen, W. Daems and J. Steckel, "Synchronous Wireless Body Sensor Network Enabling Human Body Pose Estimation," in IEEE Access, vol. 7, pp. 49341-49351, 2019, https://doi.org/10.1109/ACCESS.2019.2910636. |
[17] | K. Alsammarraie and T. Inan, "Car Control by using brain waves and Arduino based Mind wave Mobile," 2022 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), pp. 1-6, 2022, https://doi.org/10.1109/HORA55278.2022.9799911. |
[18] | S. Watson, et al., “Future emerging technologies in the wind power sector: A European perspective,” Renewable and sustainable energy reviews, vol. 113, p. 109270, 2019, https://doi.org/10.1016/j.rser.2019.109270. |
[19] | M. ElAnsary, et al., “Bidirectional peripheral nerve interface with 64 second-order opamp-less ΔΣ ADCs and fully integrated wireless power/data transmission,” IEEE Journal of Solid-State Circuits, vol. 56, no. 11, pp. 3247-3262, 2021, https://doi.org/10.1109/JSSC.2021.3113354. |
[20] | C. Chen, J. Xu, W. Ji, R. Chao, and Y. Sun, “Adaptive levitation control for characteristic model of low speed maglev vehicle,” Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, vol. 234, no. 7, pp. 1456-1467, 2020, https://doi.org/10.1177/0954406219899677. |
Muhammad Arif Seto, PID Control of Magnetic Levitation (Maglev) System