Journal of Fuzzy Systems and Control, Vol. 3, No 3, 2025 |
Design of an Indirect Adaptive Controller Based on Fuzzy Logic Control for Linear Cascade Systems Affected by Bounded Unknown Disturbances
Hoang Duc Long *
Department of Automation and Computing Techniques, Le Quy Don Technical University, Hanoi, Vietnam
Email: longhd@lqdtu.edu.vn
*Corresponding Author
Abstract—This paper presents a novel indirect adaptive control scheme that integrates fuzzy logic with a virtual integral-based adaptive controller to enhance the tracking performance of linear cascade systems under bounded unknown disturbances. The proposed controller builds upon the established indirect adaptive control framework, employing a virtual state algorithm but augments it with a fuzzy inference mechanism that dynamically adjusts a key control parameter to improve robustness and adaptability. Gaussian membership functions and a Sugeno-type fuzzy inference system are employed to fine-tune the gain parameter based on real-time tracking error and its derivative. The control law incorporates parameter adaptation, a saturation function to replace discontinuous sign operations, and a fuzzy-tuned gain to mitigate chattering and improve transient response. Simulation results under severe disturbances demonstrate significant improvements in tracking accuracy and control smoothness. Specifically, the proposed fuzzy-based controller reduces steady-state tracking error by over 40%, minimizes control chattering, and maintains robust performance under disturbance amplitudes up to 185 units-conditions that severely degrade the performance of the non-fuzzy indirect adaptive controller. The effectiveness of the proposed algorithm is shown by handling model uncertainties and external perturbations in a two-level linear cascade system.
Keywords—Indirect Adaptive Control; Fuzzy Logic Control; Linear Cascade Systems; Integral Virtual Algorithm; Bounded Unknown Disturbances; Lyapunov Stability
Cascade systems, characterized by their hierarchical structure and interdependent dynamics, arise in many engineering applications, including aerospace, chemical process control, and robotic manipulation [1]-[6]. The inherent complexity and sensitivity of such systems to external disturbances and modeling uncertainties present significant challenges for control design. In recent years, adaptive control techniques have been widely employed to tackle these issues by adjusting controller parameters in real time based on observed system behavior [7]-[12]. Among these, the indirect adaptive control with integral virtual algorithms has proven effective for handling uncertainties in linear cascade systems [13]-[15]. Despite their proven stability, traditional indirect adaptive controllers lack responsiveness under dynamic disturbances due to fixed gain strategies and abrupt control actions. This paper addresses this limitation by proposing a fuzzy-augmented indirect adaptive control strategy. The key novelty lies in the real-time fuzzy tuning of the gain parameter using Gaussian membership functions, which enhances robustness and minimizes chattering. Our contributions are summarized as follows:
Consider rephrasing as: These limitations motivate the integration of fuzzy logic systems (FLS) [16]-[20], which offer human-like reasoning and nonlinear mapping capabilities, into the adaptive control framework. Fuzzy logic can effectively tune parameters in real-time based on linguistic rules derived from control experience, thus enhancing robustness and reducing chattering phenomena typically associated with sign-based control strategies.
Through extensive simulations, the author compares the proposed controller with the non-fuzzy indirect adaptive controller under significantly bounded disturbances and reference trajectory variations. The results demonstrate that the proposed method achieves superior tracking performance, more stable adaptation, and smoother control signals, confirming its practical potential in complex control scenarios of linear cascade systems.
The control of linear cascade systems under uncertainties and disturbances has been widely studied due to their prevalence in aerospace, robotics, and process control applications. This section reviews existing methods in indirect adaptive control, fuzzy logic control, and their integration, highlighting the limitations that motivate our proposed approach.
Indirect adaptive control methods estimate unknown system parameters and use them to compute control laws [7]-[9]. They are particularly effective for linear systems with parametric uncertainty. Myshlyaev et al. [13] and Nguyen et al. [15] proposed integral virtual algorithms to handle hierarchical cascade structures. While these methods achieve stability and adaptation, they typically use fixed gain structures, which limit their responsiveness to rapid or nonlinear disturbances. Additionally, the use of sign functions in the control law introduces chattering, which can excite unmodeled dynamics and reduce control smoothness.
Fuzzy logic control (FLC) offers human-like reasoning and is suitable for handling nonlinearities and uncertainties without requiring an exact model [16],[17]. FLC has been effectively applied in adaptive control to tune gains and improve robustness [18],[19]. However, most of these works focus on direct adaptive control or systems with simple dynamics, and do not address the structural challenges of cascade systems or combine with integral virtual methods. Moreover, fuzzy logic is often applied in isolation without integration into a Lyapunov-based adaptation framework.
Several studies have explored methods to handle bounded unknown disturbances. Saturation functions have been used to mitigate chattering introduced by sign-based control laws [10],[20]. While this reduces discontinuity, it does not adaptively tune the controller's gain to varying disturbance magnitudes. Our approach extends this by embedding a fuzzy inference system to dynamically adjust the gain parameter τ(t), based on the system’s tracking error and its rate of change.
The integration of fuzzy logic with indirect adaptive control of cascade systems has received limited attention in the literature. Existing indirect adaptive controllers lack real-time adaptability to varying disturbances, and existing fuzzy controllers are rarely tailored for complex, layered dynamics. Our proposed method addresses these gaps by:
 based on real-time performance.
based on real-time performance. functions with saturation to reduce chattering while preserving Lyapunov stability.
functions with saturation to reduce chattering while preserving Lyapunov stability.This hybrid approach leverages the strengths of both indirect adaptive and fuzzy control frameworks, offering a scalable and smooth control strategy for complex linear cascade systems.
All symbols, variables, and parameters used throughout the paper are defined in Table 1. Consider the mathematical model of a class of linear cascade systems in the form [13].
| (1) |
| (2) |
where  is the vector of output state
is the vector of output state  ;
;  is the input state
is the input state  ;
;  ;
;  is the control law;
is the control law;  ;
;  ;
;  ;
;  ;
;  and
and  are scalar;
are scalar;  ;
;  is the vector of unknown parameters;
is the vector of unknown parameters;  is the bounded unknown disturbances and
is the bounded unknown disturbances and  .
.
Symbols | Definitions |
| reference signal |
| control gains |
| system states |
| error terms |
| fuzzy parameters |
| parameters of the system |
| virtual variable |
| “ideal” input |
| vector of unknown parameters |
| vector of adaptive parameters |
| Lyapunov function |
| functions |
| Laplace operator |
| output |
| control law |
| unknown disturbance |
The control objective is defined as follows:
| (3) |
where  is the tracking error;
is the tracking error;  is the vector of desired output states. An indirect adaptive controller for linear cascade systems using an integral virtual algorithm is designed in three stages as below.
is the vector of desired output states. An indirect adaptive controller for linear cascade systems using an integral virtual algorithm is designed in three stages as below.
In this stage, a virtual control  of the cascade
of the cascade  is introduced. A new manifold is given,
is introduced. A new manifold is given,
| (4) |
The extended output stage (1) will take the form
| (5) |
where  is the new input. The new output of tracking error is introduced
is the new input. The new output of tracking error is introduced
| (6) |
where  is the error of the first state;
is the error of the first state;  is the Hurwitz polynomial;
is the Hurwitz polynomial;  is the Laplace operator. Obviously, from the condition
is the Laplace operator. Obviously, from the condition  and the property of the Hurwitz polynomial
and the property of the Hurwitz polynomial  , the control objective (3) is achieved. The desired trajectory of the output cascade system is defined in the form,
, the control objective (3) is achieved. The desired trajectory of the output cascade system is defined in the form,
| (7) |
where  is a smooth function.
is a smooth function.
Therefore, the output (6) on the manifold  can be rewritten as
can be rewritten as
| (8) |
where  ;
;  ;
;  .
.
The derivative of output (8) is
| (9) |
where  ;
;  is the extended vector of unknown parameters.
is the extended vector of unknown parameters.
The “ideal” input is chosen in the form
| (10) |
So, (9) can be rewritten as (11),
| (11) |
To prove the asymptotic stability of  at
at  , the Lyapunov function is chosen as (12),
, the Lyapunov function is chosen as (12),
| (12) |
Calculate the derivative of (12) and combine it with (11), it has,
| (13) |
From (13), it can be concluded that when the output (6) on the manifold , it has , so that  .
.
In this stage, the adaptive parameters are designed for the unknown parameters of the output stage. The objective control is (14).
| (14) |
where  is the vector of adaptive parameters that corresponds to the unknown parameters of the vector
is the vector of adaptive parameters that corresponds to the unknown parameters of the vector  . To do that, an adjustable mode (AM) is introduced
. To do that, an adjustable mode (AM) is introduced
| (15) |
where  is the phase coordinate of the adjustable model;
is the phase coordinate of the adjustable model;  is the input control of the adjustable model;
is the input control of the adjustable model;  is the error.
is the error.
The derivative of the error is,
| (16) |
The input control of the adjustable mode is selected as
| (17) |
where  is the feedback coefficient. Therefore, (16) can be rewritten as (18),
is the feedback coefficient. Therefore, (16) can be rewritten as (18),
| (18) |
where  . The adaptive laws are chosen in the form of the speed gradient algorithm,
. The adaptive laws are chosen in the form of the speed gradient algorithm,
| (19) |
where  is the matrix of coefficients.
is the matrix of coefficients.
To prove the asymptotic stability of  at and
at and  at , the Lyapunov function is chosen as (20),
at , the Lyapunov function is chosen as (20),
| (20) |
Calculate the derivative of  and combine with (18) and (19), it has
and combine with (18) and (19), it has
| (21) |
From (21), it can be concluded that  and
and  .
.
In this stage, it is necessary to design the adaptive control law for closed-loop system and prove the asymptotic stability under the effects of bounded unknown disturbances. The Lyapunov function is chosen as (22)
| (22) |
Compute the derivative of (22)
| (23) |
The adaptive control law is selected as (24)
| (24) |
where  is the coefficient that guarantee
is the coefficient that guarantee  .
.
Replace (24) with (23), it has
| (25) |
where  . From (25), it can conclude that the closed-lood system with the adaptive control law (24) guarantees that and
. From (25), it can conclude that the closed-lood system with the adaptive control law (24) guarantees that and  . To reduce the chattering phenomenon, in the adaptive control law (24), the
. To reduce the chattering phenomenon, in the adaptive control law (24), the  function is replaced by the
function is replaced by the  Function that is defined as (26).
Function that is defined as (26).
| (26) |
where  is a small coefficient. Fig. 1 visualizes a block diagram that depicts the entire control architecture.
is a small coefficient. Fig. 1 visualizes a block diagram that depicts the entire control architecture.
In this section, the fuzzy logic control is applied to tune the control parameter that guarantees the robustness of system under the effects of bounded unknown disturbances [17][18]. The block diagram of the virtual integral controller combined with fuzzy logic control is demonstrated in Fig. 2.
To improve robustness, a fuzzy inference system is introduced to tune the gain parameter τ in real time. The fuzzy block receives the normalized error  and its derivative
and its derivative  as inputs and adjusts τ based on a Gaussian membership function and a Sugeno-type rule base. The updated τ is then used in the adaptive control law, replacing the fixed gain. The inputs of the fuzzy block are the error and the derivative of error
as inputs and adjusts τ based on a Gaussian membership function and a Sugeno-type rule base. The updated τ is then used in the adaptive control law, replacing the fixed gain. The inputs of the fuzzy block are the error and the derivative of error  . The output of the fuzzy block is
. The output of the fuzzy block is  . The fuzzy membership function that is used is Gauss function. There are 5 variables, including NB (Negative Big), NS (Negative Small), ZE (Zero), PS (Positive Small), and PB (Positive Big). The fuzzy rule table is designed as Table 2. The Gaussian membership functions of inputs and output are illustrated in Fig. 3. The Fuzzy Rule Surface is demonstrated in Fig. 4.
. The fuzzy membership function that is used is Gauss function. There are 5 variables, including NB (Negative Big), NS (Negative Small), ZE (Zero), PS (Positive Small), and PB (Positive Big). The fuzzy rule table is designed as Table 2. The Gaussian membership functions of inputs and output are illustrated in Fig. 3. The Fuzzy Rule Surface is demonstrated in Fig. 4.
de\e | NB | NS | ZE | PS | PB |
NB | NB | NB | NS | NS | ZE |
NS | NB | NS | NS | ZE | PS |
ZE | NS | NS | ZE | PS | PS |
PS | NS | ZE | PS | PS | PB |
PB | ZE | PS | PS | PB | PB |

The value of adjusting parameters using fuzzy logic control is given
| (27) |
where  ;
;  are the Sugeno weights;
are the Sugeno weights;  is the Gaussian membership function centered at
is the Gaussian membership function centered at  .
.  is a constant value;
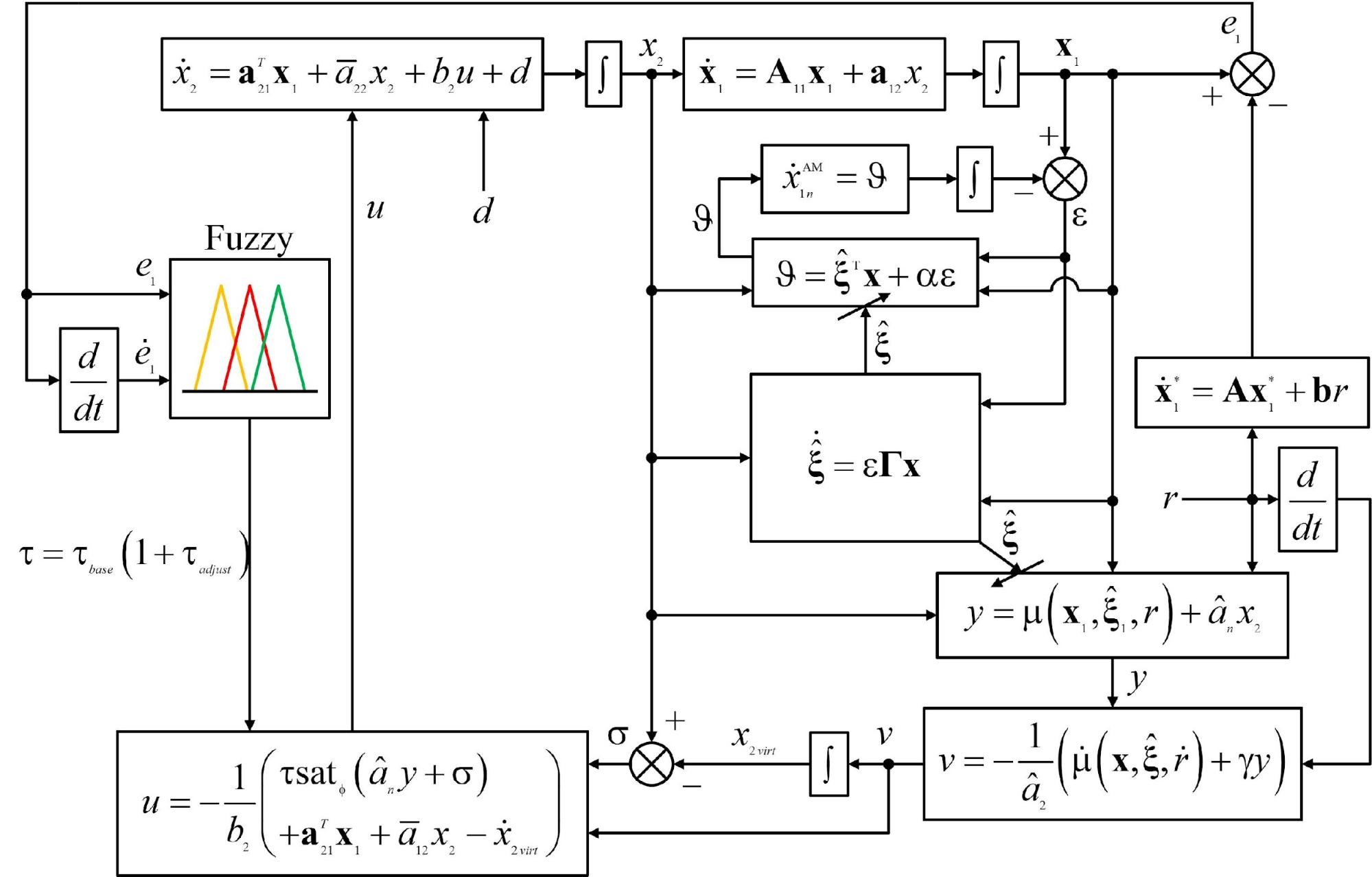
is a constant value;  is a small number added to the denominator to prevent division by zero. The full structural diagram of an indirect adaptive controller based on fuzzy logic control for a linear cascade system affected by a bounded unknown disturbance is demonstrated in Fig. 5.
is a small number added to the denominator to prevent division by zero. The full structural diagram of an indirect adaptive controller based on fuzzy logic control for a linear cascade system affected by a bounded unknown disturbance is demonstrated in Fig. 5.
To show the effectiveness of the proposed algorithm, an example of a two-level linear cascade system is given as (28) [13],
| (28) |
where  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ; the bounded unknown disturbance
; the bounded unknown disturbance  is defined as (29)
is defined as (29)  ,
,
| (29) |
The indirect adaptive control law (24) in this case is
| (30) |
The adaptive parameters are  ;
;  ;
;  . The regulator parameters are
. The regulator parameters are  ;
;  ;
;  ;
;  ;
;  . The fuzzy parameters are
. The fuzzy parameters are  ;
;  . The initial conditions are
. The initial conditions are  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  .
.
The author compares the response of adaptive control  and an adaptive controller based on fuzzy logic control
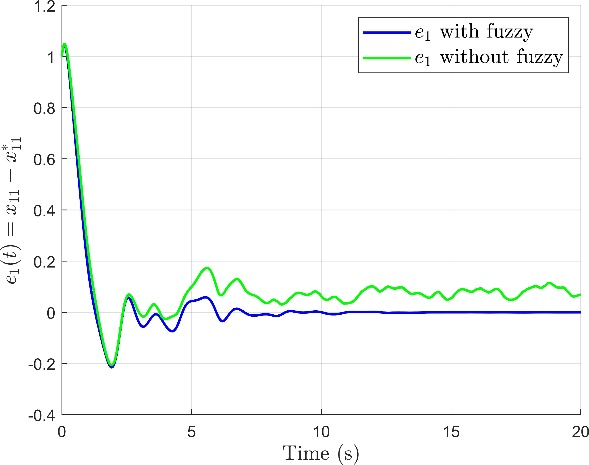
and an adaptive controller based on fuzzy logic control  with the same parameters and initial conditions. Fig. 6 shows the bounded unknown disturbance affecting the linear cascade system that is complicated and a high challenge for the control design. The comparison of the response of indirect adaptive control with and without fuzzy is illustrated in Fig. 7 to Fig. 11. In Fig. 7, the system state
with the same parameters and initial conditions. Fig. 6 shows the bounded unknown disturbance affecting the linear cascade system that is complicated and a high challenge for the control design. The comparison of the response of indirect adaptive control with and without fuzzy is illustrated in Fig. 7 to Fig. 11. In Fig. 7, the system state  responses with and without fuzzy logic control. The fuzzy controller tracks the reference more accurately and with less overshoot. As shown in Fig. 8, the proposed fuzzy-based controller reduces the steady-state tracking error by more than 40% compared to the traditional non-fuzzy version. Table III summarizes the RMSE and convergence times for all tested controllers. It is clear that the RMSE and convergence time with fuzzy are smaller than without fuzzy. Furthermore, the control signal shown in Fig. 11 is significantly smoother when fuzzy gain adjustment is used, confirming the reduced chattering effect. The parameter of the adaptive controller in Fig. 9 when using fuzzy will change based on the change of the input disturbance. In Fig. 11, the new adaptive control law based on fuzzy has less sudden changes due to the influence of unknown disturbances.
responses with and without fuzzy logic control. The fuzzy controller tracks the reference more accurately and with less overshoot. As shown in Fig. 8, the proposed fuzzy-based controller reduces the steady-state tracking error by more than 40% compared to the traditional non-fuzzy version. Table III summarizes the RMSE and convergence times for all tested controllers. It is clear that the RMSE and convergence time with fuzzy are smaller than without fuzzy. Furthermore, the control signal shown in Fig. 11 is significantly smoother when fuzzy gain adjustment is used, confirming the reduced chattering effect. The parameter of the adaptive controller in Fig. 9 when using fuzzy will change based on the change of the input disturbance. In Fig. 11, the new adaptive control law based on fuzzy has less sudden changes due to the influence of unknown disturbances.
The root mean square error (RMSE) [21],[22] is
calculated for the tracking error  (Let N is the total number of time steps (samples)):
(Let N is the total number of time steps (samples)):
| (30) |
The root mean square error (RMSE) and convergence time for both controllers are shown in Table 3:
responses with and without fuzzy logic control responses with and without fuzzy logic control responses with and without fuzzy logic control
responses with and without fuzzy logic control responses with and without fuzzy logic control responses with and without fuzzy logic control
responses with and without fuzzy logic control responses with and without fuzzy logic control
responses with and without fuzzy logic controlController | RMSE | Convergence Time (s) |
Indirect Adaptive Control with Fuzzy | 0.050 | 12.2 |
Indirect Adaptive Control without Fuzzy | 0.090 | 14.9 |
Backstepping Control [23] | 0.106 | 16.5 |
Sliding Mode Control [24] | 0.140 | 19.2 |
This paper proposed an enhanced indirect adaptive control strategy for linear cascade systems subject to bounded unknown disturbances by integrating fuzzy logic into the controller design. The novelty lies in the use of a fuzzy inference system to dynamically adjust the control gain parameter based on real-time tracking error and its derivative. Gaussian membership functions and a Sugeno-type rule base were used to modulate τ, while the control law was further improved by replacing the discontinuous sign function with a smooth saturation function to reduce chattering.
Extensive simulations demonstrated that the proposed fuzzy-based controller outperforms the conventional non-fuzzy indirect adaptive controller in terms of tracking accuracy, robustness, and control smoothness. Quantitatively, the root mean square error (RMSE) was reduced by over 40%, and the control input showed significantly less variation under large and fast-changing disturbances. These results confirm the effectiveness of the proposed approach in dealing with high-amplitude, bounded disturbances and in achieving fast, stable convergence.
In future work, we aim to:
The proposed method offers a promising direction for improving the adaptability and disturbance rejection of indirect adaptive controllers in complex real-world systems.
The author would like to thank the support of colleagues at the Department of Automation and Computing Techniques, Faculty of Control Engineering, Le Quy Don Technical University, Hanoi, Vietnam.
[1] P. V. Kokotović, “The Joy of Feedback: Nonlinear and Adaptive,” IEEE Control Systems, vol. 12, no. 3, pp. 7–17, Jun. 1992, https://doi.org/10.1109/37.165507.
[2] M. Guo, A. Lang, and M. Cantoni, “Moving Horizon Estimation for Linear Cascade Systems,” in 2018 15th International Conference on Control, Automation, Robotics and Vision, ICARCV 2018, 2018, pp. 2026–2031. doi: https://doi.org/10.1109/ICARCV.2018.8581272.
[3] D. Ding, Y. Wang, W. Zhang, and W. Chu, “Research on Identification Algorithm of Cascade Control System,” Mathematical Problems in Engineering, vol. 2022, 2022, https://doi.org/10.1155/2022/3997081.
[4] A. Bosso, L. Zaccarian, A. Tilli, and M. Barbieri, “Robust Global Asymptotic Stabilization of Linear Cascaded Systems With Hysteretic Interconnection,” IEEE Control Systems Letters, vol. 7, pp. 337–342, 2023, https://doi.org/10.1109/LCSYS.2022.3188748.
[5] P. Lin, Y. Shi, and X. F. Wang, “Equivalence Analysis of Cascade Control for a Class of Cascade Integral Systems,” IEEE Access, vol. 11, pp. 12237–12248, 2023, https://doi.org/10.1109/ACCESS.2023.3240742.
[6] A. Camino, A. Villegas, E. Pérez, R. López, G. M. Andaluz, and P. Leica, “Cascade Control Based on Sliding Mode for Trajectory Tracking of Mobile Robot Formation,” Engineering Proceedings, vol. 77, no. 1, 2024, https://doi.org/10.3390/engproc2024077013.
[7] W. Li and J. J. E. Slotine, “An indirect adaptive robot controller,” Systems and Control Letters, vol. 12, no. 3, pp. 259–266, 1989, https://doi.org/10.1016/0167-6911(89)90058-3.
[8] I. D. Landau, R. Lozano, and M. M’Saad, Adaptive Control, no. 9780857296634, 1998, https://doi.org/10.1007/978-0-85729-343-5.
[9] G. Tao, “Indirect Adaptive Control,” in Adaptive Control Design and Analysis, pp. 295–348, 2003, https://doi.org/10.1002/0471459100.ch7.
[10] M. Benosman, A. Farahmand, and M. Xia, “Learning-based modular indirect adaptive control for a class of nonlinear systems,” in 2016 American Control Conference (ACC), pp. 733–738, 2016, https://doi.org/10.1109/ACC.2016.7525001.
[11] A. Barth, J. Reger, and J. A. Moreno, “Indirect Adaptive Control for Higher Order Sliding Mode,” IFAC-PapersOnLine, vol. 51, no. 13, pp. 591–596, 2018, https://doi.org/10.1016/j.ifacol.2018.07.344.
[12] R. Ortega, R. Cisneros, L. Wang, and A. Schaft, “Indirect Adaptive Control of Nonlinearly Parameterized Nonlinear Dissipative Systems,” Electrical Engineering and Systems Science, vol. 32, no. 9, pp. 5105-5119 2022, https://doi.org/10.48550/arXiv.2201.05749.
[13] C. T. Nguyen and A. V Finoshin, “Indirect Model Reference Adaptive Control of Cascade Systems Based on the Speed-Bigradient Method,” Mekhatronika, Avtomatizatsiya, Upravlenie, vol. 26, no. 4, pp. 167–177, 2025, https://doi.org/10.17587/mau.24.167-177.
[14] X. Xing and J. Liu, “Robust Adaptive Control Allocation for a Class of Cascade ODE-String Systems With Actuator Failures,” IEEE Transactions on Automatic Control, vol. 67, no. 3, pp. 1474–1481, 2022, https://doi.org/10.1109/TAC.2021.3063345.
[15] C. T. Nguyen and A. V Finoshin, “Indirect Model Reference Adaptive Control of Cascade Systems Based on the Speed-Bigradient Method,” Mekhatronika, Avtomatizatsiya, Upravlenie, vol. 26, no. 4, pp. 167–177, 2025, https://doi.org/10.17587/mau.24.167-177.
[16] Chun-Yi Su and Y. Stepanenko, “Adaptive control of a class of nonlinear systems with fuzzy logic,” IEEE Transactions on Fuzzy Systems, vol. 2, no. 4, pp. 285–294, 1994, https://doi.org/10.1109/91.324808.
[17] C. G. Moore and C. J. Harris, “Indirect adaptive fuzzy control,” International Journal of Control, vol. 56, no. 2, pp. 441–468, 1992, https://doi.org/10.1080/00207179208934322.
[18] R. Qi, “Indirect adaptive fuzzy control for a class of nonlinear systems,” IFAC Proceedings Volumes, vol. 40, no. 9, pp. 256–261, 2007, https://doi.org/10.3182/20070723-3-PL-2917.00041.
[19] N. H. Tho, V. N. Y. Phuong, and L. T. Danh, “Development of an Adaptive Fuzzy Sliding Mode Controller of an Electrohydraulic Actuator Based on a Virtual Prototyping,” Actuators, vol. 12, no. 6, p. 258, 2023, https://doi.org/10.3390/act12060258.
[20] H. H. Tang and N. S. Ahmad, “Fuzzy logic approach for controlling uncertain and nonlinear systems: a comprehensive review of applications and advances,” Systems Science & Control Engineering, vol. 12, no. 1, 2024, https://doi.org/10.1080/21642583.2024.2394429.
[21] W. Wang and Y. Lu, “Analysis of the Mean Absolute Error (MAE) and the Root Mean Square Error (RMSE) in Assessing Rounding Model,” IOP Conference Series: Materials Science and Engineering, vol. 324, no. 1, p. 012049, 2018, https://doi.org/10.1088/1757-899X/324/1/012049.
[22] T. Chai and R. R. Draxler, “Root mean square error (RMSE) or mean absolute error (MAE)? – Arguments against avoiding RMSE in the literature,” Geoscientific Model Development, vol. 7, no. 3, pp. 1247–1250, 2014, https://doi.org/10.5194/gmd-7-1247-2014.
[23] Xingcheng Wang, “Backstepping Stabilization for Cascade Infinite-dimensional Systems,” in 2006 6th World Congress on Intelligent Control and Automation, pp. 1368–1372, 2006, https://doi.org/10.1109/WCICA.2006.1712571.
[24] M. Coronel, R. Orellana, L. Mora, R. Rojas, and J. C. Agüero, “A Sliding Mode Control Strategy for Cascade Systems,” IEEE Latin America Transactions, vol. 17, no. 09, pp. 1410–1417, 2019, https://doi.org/10.1109/TLA.2019.8931133.
Hoang Duc Long, Design of an Indirect Adaptive Controller based on Fuzzy Logic Control for Linear Cascade Systems affected by
Bounded Unknown Disturbances