Phichitphon Chotikunnan 1 , Wanida Khotakham 2,* , Pariwat Imura 3 , Rawiphon Chotikunnan 4 ,
Anantasak Wongkamhang 5 , Nuntachai Thongpance 6
Journal of Fuzzy Systems and Control, Vol. 3, No 3, 2025 |
Comparative Analysis of PID-Driven Data-Based and PSO-Tuned Fuzzy Membership Functions for Robotic Manipulator Control
Phichitphon Chotikunnan 1 , Wanida Khotakham 2,* , Pariwat Imura 3 , Rawiphon Chotikunnan 4 ,
Anantasak Wongkamhang 5 , Nuntachai Thongpance 6
1, 2, 3, 4, 5, 6 College of Biomedical Engineering, Rangsit University, Pathum Thani, Thailand
Email: 1 phichitphon.c@rsu.ac.th, 2 wanida.k@rsu.ac.th, 3 pariwat.i@rsu.ac.th, 4 rawiphon.c@rsu.ac.th,
5 anantasak.w@rsu.ac.th, 6 nuntachai.t@rsu.ac.th
*Corresponding Author
Abstract—Robotic manipulators require control systems that are both responsive and precise in order to ensure accurate tracking and stability in dynamic environments. Conventional fuzzy logic controllers that are based on proportional integral derivative (PID) methods frequently encounter difficulties in achieving fast response, minimal steady-state error, and low overshoot. This study presents a comparative evaluation of a PID-driven data-based fuzzy logic controller and a particle swarm optimization (PSO) tuned fuzzy logic controller for a three-axis robotic manipulator implemented in Simulink. Both controllers used Gaussian membership functions within a Mamdani inference structure. The PSO algorithm was employed to optimize fuzzy input-scaling gains using a composite performance index that incorporated absolute error, control effort, overshoot penalty, and steady-state error. The simulation results indicate that the PSO-tuned controller consistently outperformed the benchmark. On the R-axis, it shortened rise and settling times and reduced overshoot, mean absolute error (MAE), and root mean square error (RMSE). On the T-axis, response speed and error values improved, although overshoot increased, indicating a trade-off between speed and stability. On the Z-axis, the PSO controller achieved a substantial decrease in overshoot, lower error metrics, and faster stabilization. Overall, the PSO-based tuning process preserved steady-state stability while improving transient performance on all axes. These findings show that metaheuristic optimization is an effective and practical method for enhancing fuzzy logic controllers in robotic manipulators. This approach has potential applications in precision manufacturing, service automation, and surgical robotics.
Keywords—Fuzzy Logic Control; Robotic Manipulator; Membership Functions; Step Input Tracking
In manufacturing, medical procedures, and service automation, industrial robotic manipulators are essential for achieving high throughput while maintaining micrometer-level precision. Although they possess these capabilities, their adaptability is restricted by two persistent obstacles. Initially, the reference profile is a critical factor in the controller's performance, necessitating distinct strategies for step inputs and smooth trajectories. Secondly, the accumulation of disturbances and modeling inaccuracies over cycles can diminish long-term stability [1]-[4].
Due to their simplicity and efficiency, proportional-integral-derivative (PID) controllers continue to be a favored solution in robotic applications. Numerous improvements have been suggested, such as fuzzy PID hybrids for brushless direct current (BLDC) motors [1], evolutionary search-based tuning for microrobots [2], fractional-order PID controllers optimized by bee colony algorithms [3], and variable-structure fuzzy PID controllers for low-cost electric vehicles [4][5]. Metaheuristic techniques, including genetic algorithms (GA) and particle swarm optimization (PSO), significantly improve inverter and drive dynamics [6]-[9]. Simulation-based studies confirm that intelligent tuning can effectively reduce overshoot and improve transient performance in direct current (DC) drives [10][11]. The advantages of intelligent optimization across PID, fractional-order PID (FOPID), iterative sliding mode control (ISF), sliding mode control (SMC), and fuzzy logic control (FLC) are further validated by benchmarks [12]. Fuzzy PID designs have also been shown to work well in electric power systems and spacecraft when there are problems [13].
Fuzzy logic control (FLC) has advanced considerably alongside the evolution of PID systems [14]. For example, Takagi-Sugeno fuzzy loops lower steady-state error in permanent magnet synchronous motor (PMSM) drives [15], fuzzy regulators stabilize pico-hydro plants [16], gain-scheduled FLCs are used in mobile robotics [17], and programmable logic controller/supervisory control and data acquisition (PLC/SCADA)-integrated fuzzy systems are used to manage conveyors [18]. Additional applications include the control of quadcopters and water jets [19]-[21], the optimization of fuzzy PID controllers for hybrid power grids using the gray wolf algorithm [22]-[24], and the demonstration of hardware feasibility through Arduino-based sliding mode fuzzy control [25]. Pure FLC has been demonstrated to maintain the speed of BLDC motors in the presence of fluctuating demands [26]. Decision-making [27], navigation [28], adaptive surface control [29], warehouse planning [30][31], vibration suppression [32], and hybrid integrations with linear quadratic regulator (LQR) PID [33] and fractional-order PID [34] are all areas in which fuzzy inference has been implemented in robotics. Additional research has identified applications in obstacle avoidance [35][36], quadcopter self-tuning [37], robot operating system (ROS)-based dynamic linearization [38], adaptive manipulation [39]-[42], and iterative or repetitive control for precision manipulators [43]-[47].
In addition to robotics, PID-fuzzy systems have been implemented in the following areas: renewable energy control [48]-[53], milk pasteurization [54], expert systems [55]-[58], anomaly detection [59], rotating machinery diagnosis [60], underwater video enhancement [61], and multi-robot coordination [62]. Fuzzy expert systems are the subject of additional research, which includes domain-wide surveys [63][64] as well as medical and safety applications like Mamdani-Sugeno diagnostic tools [65] and offshore safety evaluation [66]. These works demonstrate the adaptability of fuzzy controllers, but they also disclose their inclination toward domain-specific designs that restrict generalizability across reference profiles.
The performance of fuzzy membership functions is significantly influenced by the geometry, as evidenced by recent investigations. Triangular functions enhance step response, while bell-shaped functions provide superior steady-state accuracy for smooth trajectories [67]. Additional research on manipulators has revealed profile-specific tuning [68], particle swarm optimization (PSO)-tuned augmented proportional-derivative (PD) controllers [69], and comprehensive evaluations of parallel robotics control [70]. Comparative investigations of Type-1 and Type-2 fuzzy controllers demonstrate that Type-2 provides superior tracking performance; however, this performance is at the cost of computational complexity [71]-[73].
However, the majority of current methods are predicated on conventional or fixed membership parameters, which frequently fail to guarantee reliable performance in a variety of operating environments. Systematic comparisons between metaheuristic optimization and data-based tuning are still limited. In particular, there is a scarcity of research that explicitly compares PID-driven, data-based fuzzy membership functions (PDD-FLCs) derived from experimental data with particle swarm optimization-tuned fuzzy membership functions (PSO-FLCs) under identical conditions. This study fills that void by conducting a comparative assessment of these two methodologies on a three-axis Seiko D-Tran RT3200 robotic manipulator.
MATLAB/Simulink is employed to implement both controllers, which are implemented using Gaussian membership functions and a Mamdani inference framework. Overshoot, rise time, settling time, mean absolute error (MAE), and root mean square error (RMSE) are employed to assess performance on the R, T, and Z axes. The findings indicate that PSO-tuned membership functions accomplish a faster stabilization, lower error metrics, and an enhanced transient response. However, this benefit is offset by an increase in overshoot on the T-axis. The practical contribution of this study is to verify PSO-based tuning as a high-performance and robust option for fuzzy logic control in robotic manipulators. This has direct implications for precision manufacturing, service robotics, and medical automation.
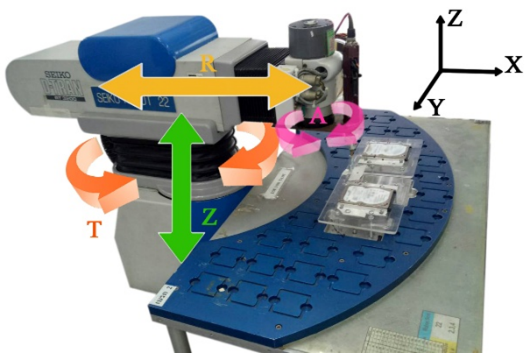
Industrial operations, including welding, assembly, and painting, frequently employ robotic manipulators. SCARA, Cartesian, delta, spherical, and cylindrical robots are among the most common configurations. The case example in this investigation is the Seiko D-Tran RT3200 robotic manipulator, as depicted in Fig. 1.
The Seiko D-Tran RT3200 is a cylindrical robotic arm composed of four joints. Joint R enables horizontal translation along the X-axis, Joint Z provides vertical displacement, and Joints T and A generate rotational motion within the X-Y plane. The cRIO-9075 platform is used to control four actuators that drive these joints, and the system is programmed using LabVIEW.
This manipulator is modeled as a discrete-time system with a sampling interval of 0.055 s. Previous research has characterized its dynamic properties and control algorithms [43][73]. The open-loop transfer function of the system is expressed in (1), and the coefficients  ,
,  , and
, and  for each joint are summarized in Table 1.
for each joint are summarized in Table 1.
| (1) |
Joint |
|
|
|
Joint R | 0.0333 | -1.6871 | 0.6884 |
Joint T | 0.0162 | -1.7077 | 0.7111 |
Joint Z | 0.0140 | -1.7519 | 0.7526 |
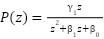
The manipulator's motion was regulated using a fuzzy logic controller (FLC) that employed an approximate reasoning approach with a Mamdani inference system, which is widely applied in robotic manipulators. Fig. 2 depicts the architecture of the fuzzy system, and the controller was implemented and evaluated using MATLAB/Simulink.
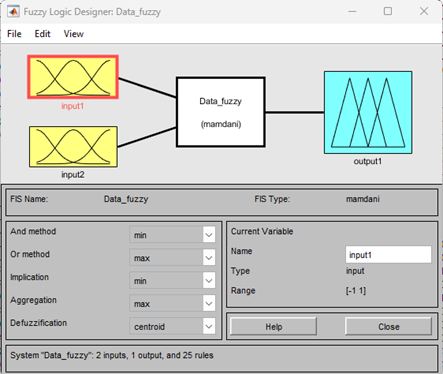
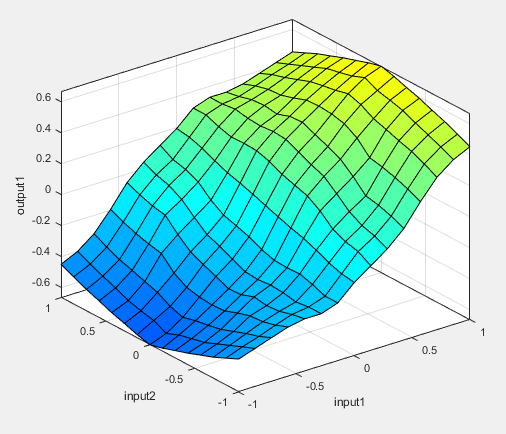
Both input variables, namely the tracking error and its rate of change, were assigned five Gaussian membership functions within the normalized range of -1 to 1, as shown in Fig. 3. The output variable employed nine Gaussian membership functions within the same range. Centroid defuzzification was carried out in accordance with (2) and reference [73]. The fuzzy rule base is presented in Table 2, while the nonlinear input-output mapping is illustrated by the fuzzy logic controller (FLC) surface viewer in Fig. 4.
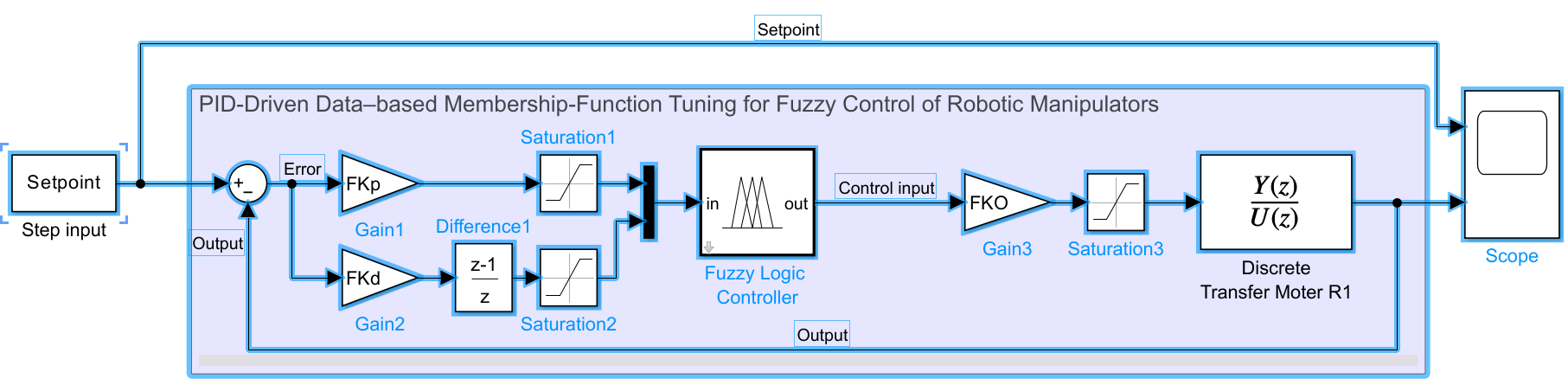
The actuator command constraints were established as follows. Joint R varied from -40 to 40, Joint T varied from -15 to 15, and Joint Z varied from -20 to 20. The relevant input scaling factors were 1/40, 1/15, and 1/20, respectively. The control output range for all joints was established between -100 and 100, with a scaling factor of 100 implemented. The calibrated fuzzy gain settings for each joint are presented in Table 3. The parameters were derived by augmenting the methods in [67] and [73] to include Gaussian membership functions for parameter optimization and controller design. Fig. 5 illustrates the Simulink implementation of the fuzzy logic controller.
Input I, f(e) | ||||||
Input II, f(de) | - | NB | NS | ZO | PS | PB |
NB | NM | NS | NM | PS | PM | |
NS | NB | NM | NS | PM | PB | |
ZO | VNB | NB | ZO | PB | VPB | |
PS | NB | NM | PS | PM | PB | |
PB | NM | NS | PM | PS | PM | |
Joint |
|
|
Joint R | 0.02500 | 0.02500 |
Joint T | 0.06666 | 0.06666 |
Joint Z | 0.05000 | 0.05000 |
| (2) |
Here,  denotes the membership value associated with each point
denotes the membership value associated with each point  in the universe of discourse.
in the universe of discourse.
The particle swarm optimization (PSO) method was employed to optimize the fuzzy input-scaling gains (PFKP and PFKD) for the error (e) and the change in error (de), which are associated with the proportional fuzzy gain parameters (PFKP) in a Mamdani-type fuzzy logic controller for a three-axis robotic manipulator. The objective of the optimization was to minimize a composite performance index comprising the integral of absolute error (IAE), control effort, overshoot penalty, and steady-state error. The control output scaling (KFO) was constrained to the range from -100 to 100 to ensure secure and reliable actuation, with step reference signals of 10 millimeters, 3.75 degrees, and 5 millimeters applied to the R, T, and Z axes, respectively.
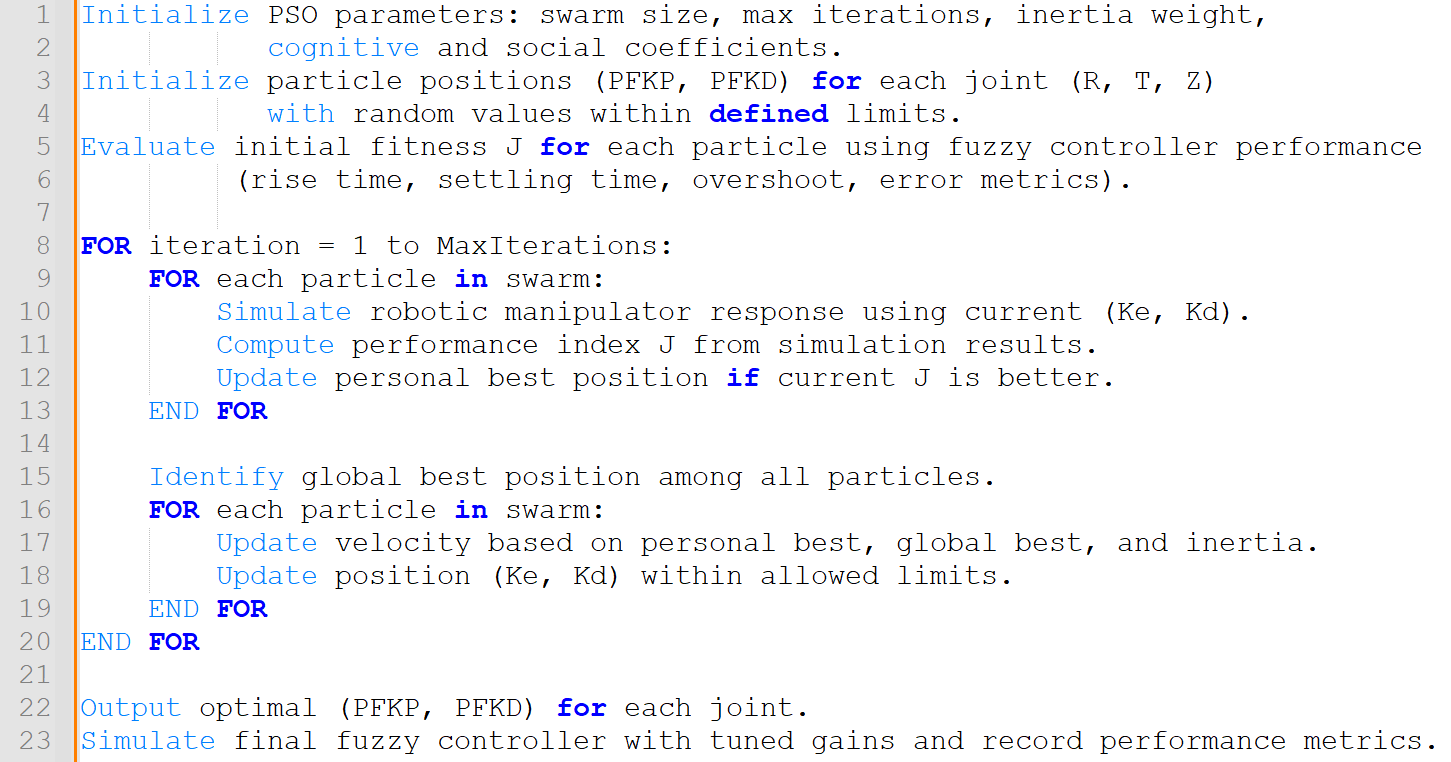
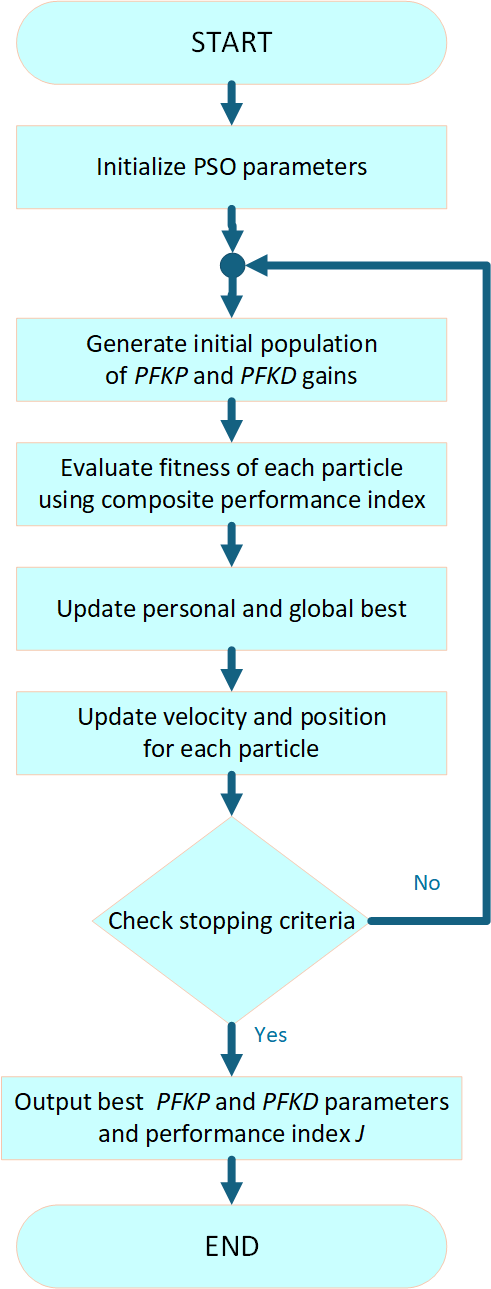
The PSO procedure, illustrated in Fig. 6 and Fig. 7, begins with the determination of parameters including swarm size, iteration count, inertia weight, and acceleration coefficients. Each particle represented a possible configuration of PFKP and PFKD gains, initialized randomly within defined limits. The fitness of each particle was evaluated using the composite performance index derived from simulation results, and both personal and global best values were subsequently revised. Throughout each iteration, particle velocities and positions were adjusted using inertia, cognitive, and social influences.
The termination criteria were defined as either achieving the maximum number of iterations or obtaining a function tolerance of 1×10-6 without improvement for 20 successive iterations. The chosen parameter configurations included a swarm size of 40 particles, a maximum of 80 iterations, and an inertia weight that progressively decreased from 0.9 to 0.4. The acceleration coefficients were defined as cognitive coefficient c1 = 2.0 and social coefficient c2 = 2.0. The cost function weights were assigned as follows: absolute error = 1.0, overshoot penalty = 0.5, control effort = 0.0001, and steady-state error bias = 0.2.
The optimization yielded the optimal fuzzy gain parameters for each joint. The best values for the R-axis were PFKP = 0.15434 and PFKD = 0.00100. The optimum values for the T-axis were PFKP = 0.09419 and PFKD = 0.00100. The best values for the Z-axis were PFKP = 0.10140 and PFKD = 0.60861. The values were derived after 80 iterations, resulting in an optimal performance index of J = 6.74178. The PSO-optimized fuzzy controller markedly enhanced transient responsiveness and diminished steady-state error relative to the baseline fuzzy controller, albeit with a concomitant rise in overshoot along the T-axis. The conclusive optimized parameters are shown in Table 4, the pseudocode is illustrated in Fig. 6, and the optimization method is detailed in Fig. 7.
Joint |
|
|
Joint R | 0.15434 | 0.00100 |
Joint T | 0.09419 | 0.00100 |
Joint Z | 0.10140 | 0.60861 |
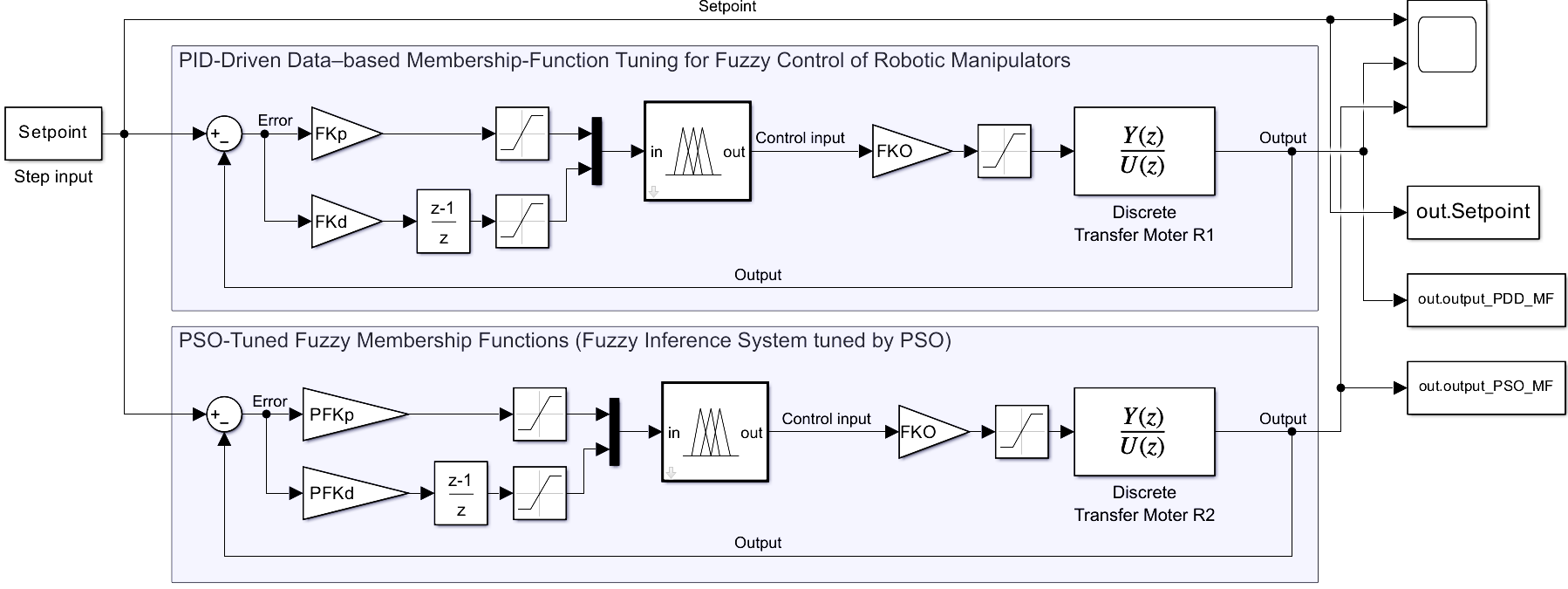
Simulation experiments were conducted on the R, T, and Z joints of the robotic manipulator to evaluate the fuzzy logic control system. The designated step reference signals were employed to evaluate each joint, with the R-axis being 20 millimeters, the T-axis being 7.5 degrees, and the Z-axis being 12 millimeters. The control architecture, which was developed in Simulink, utilized Gaussian membership functions and comprised both the PID-driven data-based membership functions (PDD_MF) controller and the Particle swarm optimization-tuned membership functions (PSO_MF) controller, as illustrated in Fig. 8.
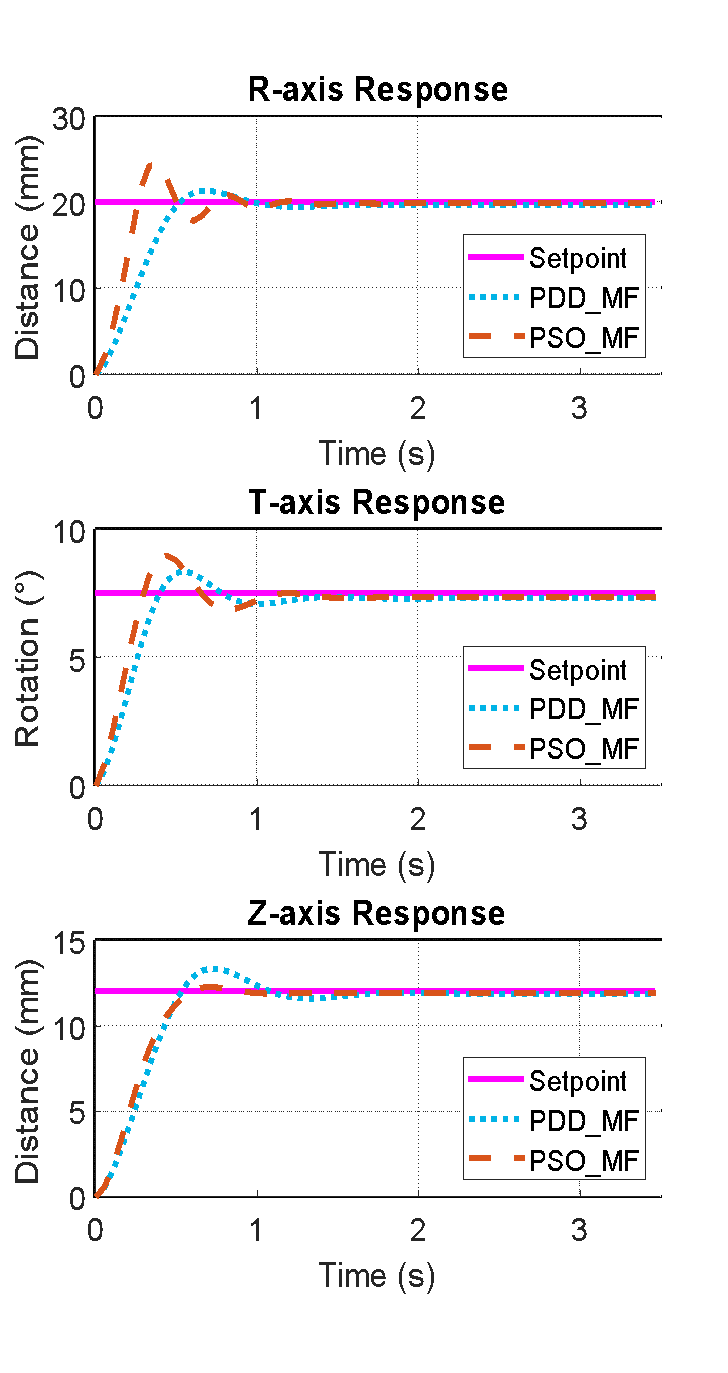
The comparative system responses are shown in Fig. 9. On the R-axis, the PSO_MF controller exhibited a significantly shorter rise time of 0.275 seconds compared to 0.495 seconds and a shorter settling time of 1.10 seconds compared to 1.375 seconds than the PDD_MF controller. Additionally, the mean absolute error (MAE) decreased from 1.882 to 1.394 and the root mean square error (RMSE) decreased from 4.838 to 4.098, while overshoot was reduced from 7.11 percent to 2.41 percent as shown in Table 5. These improvements demonstrate that particle swarm optimization can explore parameter combinations that surpass those derived from the proportional integral derivative (PID) approximation, resulting in a controller that adapts more effectively to transient dynamics.
The PSO_MF controller demonstrated enhanced dynamics on the T-axis in Table 6, resulting in a reduction of the rise time from 0.385 seconds to 0.330 seconds and the settling time from 3.465 seconds to 1.705 seconds. However, this enhancement resulted in a substantial increase in overshoot, which increased from 11.77 percent to 19.90 percent. The cost function design is the source of the trade-off. The composite performance index included overshoot, but it was assigned a lower weight of 0.5 in comparison to the absolute error term, which was weighted at 1.0. As a result, the optimization procedure prioritized rapid convergence and reduced tracking error over overshoot suppression. The dynamic properties of the T-axis, which are inherently more oscillatory due to their model coefficients, further influenced this effect. This suggests that particle swarm optimization is effective in reducing steady-state error; however, the weighting strategy employed may result in a preference for responsiveness over transient stability.
The PSO_MF controller also exhibited a significant advance in its Z-axis performance. As shown in Table 7, the overshoot was reduced from 11.56 percent to 2.51 percent, and the settling time was reduced from 1.540 seconds to 0.825 seconds. MAE and RMSE also improved, with a decrease from 1.245 to 1.004 and from 3.046 to 2.873, respectively. The rise time increased slightly to 0.550 seconds from 0.495 seconds, suggesting that particle swarm optimization prioritized the reduction of oscillation and error minimization. This implies that a more equitable configuration was determined for this axis.
The results indicate that the PSO_MF controller has a superior transient response and a reduced tracking error in comparison to the PDD_MF controller at the majority of joints. The distinction is in the optimization mechanism. The PSO_MF controller refines parameters by conducting an iterative search of the performance landscape, whereas the PDD_MF controller implements parameter estimates derived from PID tuning in fuzzy logic control. The lower MAE and RMSE values are indicative of the effectiveness of particle swarm optimization in improving stability and reducing error, which is facilitated by its iterative learning capability. Nevertheless, the significance of meticulously selecting performance index weightings to prevent undesirable trade-offs in practical implementations is emphasized by the increased overshoot observed on the T-axis. In order to more effectively balance stability and speed, future research may involve the application of more stringent overshoot constraints or the implementation of multi-objective optimization strategies.
Type | Rise time | Settling Time | %OS | MAE | RMSE |
PDD MF | 0.495 | 1.375 | 7.11 | 1,882 | 4.838 |
PSO MF | 0.275 | 1.100 | 2.41 | 1.394 | 4.098 |
Type | Rise time | Settling Time | %OS | MAE | RMSE |
PDD MF | 0.385 | 3.465 | 11.77 | 0.700 | 1.681 |
PSO MF | 0.330 | 1.705 | 19.90 | 0.615 | 1.542 |
Type | Rise time | Settling Time | %OS | MAE | RMSE |
PDD MF | 0.495 | 1.540 | 11.56 | 1.245 | 3.046 |
PSO MF | 0.550 | 0.825 | 2.51 | 1.004 | 2.873 |
A comparative evaluation of a proportional integral derivative (PID)-driven data-based fuzzy logic controller and a particle swarm optimization (PSO)-tuned fuzzy logic controller was conducted in this study for a three-axis robotic manipulator. The control framework in Simulink implemented Gaussian membership functions for both inputs, monitoring error and its rate of change, and for the output within a Mamdani inference structure. The optimization objective was to decrease a composite performance index that encompassed the integral of absolute error, control effort, overshoot penalty, and steady-state error by adjusting fuzzy input-scaling gains through the application of the particle swarm optimization algorithm. The particle swarm optimization-tuned membership functions exhibited substantial improvements in control performance across all three axes when the simulation results were contrasted with the baseline proportional integral derivative-driven data-based design. The particle swarm optimization-tuned controller decreased overshoot on the R and Z axes, obtained faster rise and settling times on the majority of axes, and in nearly all cases reduced both mean absolute error and root mean square error. The T-axis demonstrated a trade-off between increased overshoot and a speedier response, although the system's behavior was characterized by stable steady-state operation and improved transient performance. The broader significance of this work is that it illustrates how metaheuristic optimization can modify fuzzy membership functions for robotic manipulators that operate under a variety of reference profiles. The method is particularly relevant in precision assembly lines, surgical robotic instruments, and service robots, where both adaptability and high accuracy are essential. The scope of applicability is most appropriate for manipulators with nonlinear dynamics and duties that necessitate repetitive tracking under variable disturbances. The proposed method underscores the practical implications of enhancing the robustness, flexibility, and accuracy of robotic manipulator control, thereby enabling precision manufacturing, medical robotics, and automated service environments. However, the applicability of particle swarm optimization is restricted by the computational cost and the dependence on simulation-based validation, which may not fully represent actuator nonlinearities or real-world disturbances. Three primary directions will be the focus of future research. First, the optimization cost function will be redesigned to optimize the trade-off between overshoot suppression and rapid response, potentially utilizing multi-objective optimization frameworks. Second, the method's robustness beyond simulation will be verified through real-world hardware validation using the Seiko D-Tran RT3200 manipulator. Third, the investigation will focus on the development of adaptive real-time tuning strategies and the application of these strategies to manipulators with increased degrees of freedom. These advancements will facilitate the practical implementation of fuzzy controllers that are enhanced by particle swarm optimization in industrial, medical, and service robotics applications.
The researcher would like to thank the Research Institute, Academic Services Center, and College of Biomedical Engineering, Rangsit University, for the grant of research funding to the research team. Furthermore, it is confirmed that the project has been reviewed by the Ethics Review Board of Rangsit University, with reference number RSUERB2025-006, which certifies that the research does not involve human subjects.
Phichitphon Chotikunnan, Comparative Analysis of PID-Driven Data-Based and PSO-Tuned Fuzzy Membership Functions for Robotic Manipulator Control