Journal of Fuzzy Systems and Control, Vol. 3, No 3, 2025 |
Enhanced Disturbance Estimation for Tracking Control of Nonlinear Systems Using Adaptive Fuzzy Finite-Time Observers
Hoang Duc Long 1,* , Vu Xuan Duc 2
1,2 Department of Automation and Computing Techniques, Le Quy Don Technical University, Vietnam
Email: 1 longhd@lqdtu.edu.vn, 2 ducvx@lqdtu.edu.vn
*Corresponding Author
Abstract—Accurate estimation of unknown and time-varying disturbances is essential for achieving high-performance control of nonlinear systems. This paper investigates the design and comparative evaluation of finite-time disturbance observers with different gain adaptation mechanisms. First, a conventional fixed-gain finite-time disturbance observer and a linearly adaptive finite-time disturbance observer are presented. Then, an adaptive finite-time disturbance observer based on fuzzy logic control is developed to automatically adjust observer gains according to the disturbance estimation error and its rate of change, thereby reducing gain sensitivity and improving transient performance. Finite-time stability of the closed-loop system is rigorously analyzed using Lyapunov theory, and sufficient conditions for convergence are derived. Extensive simulation studies on a nonlinear system subject to high-frequency time-varying disturbances demonstrate the effectiveness of the proposed approach. Quantitative results show that the adaptive finite-time disturbance observer based on fuzzy logic control reduces tracking error and disturbance estimation root mean square error by more than 75% compared with the conventional finite-time disturbance observer and by over 50% compared with the linearly adaptive observer, while yielding smoother control inputs. These results confirm that the adaptive finite-time disturbance observer based on fuzzy logic control significantly enhances robustness and estimation accuracy, making the proposed observer suitable for practical nonlinear control applications under severe disturbance conditions.
Keywords—Finite‐Time Disturbance Observer; Fuzzy Logic Control; Adaptive Observer; Nonlinear Control; Disturbance Estimation; Tracking Error; Lyapunov Stability
Disturbances and uncertainties are unavoidable in practical control systems and often degrade tracking accuracy, stability, and robustness, especially for nonlinear plants. External disturbances, unmodeled dynamics, parameter variations, and measurement noise are commonly encountered in engineering applications such as robotic systems, electromechanical actuators, and process control. Consequently, effective disturbance estimation and compensation have become essential topics in modern nonlinear control theory.
Among existing approaches, disturbance observer–based control has been widely studied due to its simple structure and strong robustness properties. Conventional disturbance observers and extended state observers are typically designed to guarantee asymptotic convergence of the estimation error under mild assumptions. However, asymptotic convergence may be insufficient in applications requiring fast transient response and high precision, particularly in the presence of time-varying or high-frequency disturbances.
To address this limitation, finite-time disturbance observers (FTDOBs) have been proposed to ensure that estimation errors converge to zero within a finite time interval. Finite-time convergence offers faster response and stronger robustness compared with asymptotic schemes and has attracted significant attention in recent years [1]-[5]. Nevertheless, most existing FTDOB designs rely on fixed observer gains, which must be chosen conservatively to ensure stability. Large fixed gains may lead to chattering, noise amplification, or excessive control effort, while small gains may degrade convergence speed and disturbance rejection performance.
To reduce gain sensitivity, several studies have introduced adaptive finite-time disturbance observers, where observer gains are adjusted online according to estimation errors [6]-[10]. Although linear or parameter-based adaptive laws can improve robustness to some extent, their adaptation capability is often limited when dealing with rapidly changing or high-frequency disturbances. Moreover, the tuning process may still be nontrivial, and performance degradation can occur under severe disturbance conditions.
Fuzzy logic control has been widely recognized as an effective tool for handling nonlinearities, uncertainties, and imprecise information without requiring an accurate mathematical model [11]-[17]. By incorporating heuristic knowledge through linguistic rules, fuzzy systems can adapt controller or observer parameters in a flexible and intuitive manner. Despite these advantages, the systematic integration of fuzzy logic-based gain adaptation into finite-time disturbance observers, together with rigorous finite-time stability analysis and quantitative performance comparison, remains insufficiently explored in the existing literature.
Therefore, the following gaps can be identified:
These gaps motivate the development of a more flexible and robust disturbance observer that combines finite-time convergence with intelligent gain adaptation. In this paper, we investigate and compare finite-time disturbance observers with different gain adaptation strategies. Unlike existing adaptive FTDOBs that rely on linear gain adaptation, the proposed fuzzy mechanism adapts gains using both error magnitude and error rate, enabling improved performance under high-frequency disturbances. The main contributions are summarized as follows:
The paper is organized as follows: Section III describes the system model and revisits the fixed‐gain finite‐time disturbance observer presented in previous studies. The limitations of FTDOB are discussed, motivating the development of adaptive algorithms for observer gain adjustment. Section IV introduces the adaptive finite‐time disturbance observer integrated with a backstepping controller for the nonlinear system. Stability analysis is conducted based on a suitably chosen Lyapunov function. In Section V, an enhanced adaptive finite‐time disturbance observer is developed using an adaptive finite‐time disturbance observer based on fuzzy logic control. Section VI presents simulation results and quantitative comparisons among the three observers: FTDOB, AFTDOB, and AFTDOB‐Fuzzy. Finally, Section VII concludes the study.
Disturbance observer-based control has been extensively studied as an effective approach to compensate for uncertainties and external disturbances in control systems. Existing works related to the present study can be broadly classified into three categories: conventional disturbance observers, finite-time disturbance observers with fixed or adaptive gains, and fuzzy logic–based observer and control approaches.
Traditional disturbance observers and extended state observers have been widely applied to linear and nonlinear systems to estimate lumped disturbances and model uncertainties [18]-[20]. These methods typically guarantee asymptotic convergence of the estimation error and are relatively simple to implement. However, their convergence speed is often insufficient in applications requiring fast transient response. Moreover, performance may degrade significantly in the presence of rapidly time-varying or high-frequency disturbances, which motivates the development of finite-time estimation techniques.
To enhance convergence speed and robustness, finite-time disturbance observers (FTDOBs) have been proposed in recent years [2], [21], [22]. By employing nonlinear correction terms and finite-time stability theory, these observers ensure that estimation errors converge to zero within a finite time interval. Despite these advantages, most existing FTDOBs rely on fixed observer gains, which must be conservatively selected to guarantee stability. Large gains may cause chattering and noise amplification, whereas small gains may slow convergence and reduce disturbance rejection capability.
To address this issue, several adaptive finite-time disturbance observers have been developed [7]-[9], where observer gains are adjusted online based on estimation errors or predefined adaptation laws. While such approaches improve robustness and reduce gain sensitivity, the adaptation mechanisms are often linear or parameter-dependent, which limits their flexibility when dealing with severe or high-frequency disturbances. Furthermore, quantitative comparisons among different adaptive strategies are rarely reported, making it difficult to assess their relative performance.
Fuzzy logic control has been widely recognized as an effective tool for handling nonlinearities, uncertainties, and imprecise information without relying on accurate system models [14]-[17]. Fuzzy systems have been successfully applied to adaptive control, observer design, and disturbance estimation by incorporating heuristic rules derived from expert knowledge. In particular, fuzzy-based gain tuning has been shown to enhance adaptability and robustness in nonlinear control systems.
However, most fuzzy logic-based observer designs focus on asymptotic convergence or lack rigorous finite-time stability analysis [11], [23], [24]. In addition, the integration of fuzzy logic-based adaptive gain mechanisms into finite-time disturbance observers has not been systematically investigated, and comparative studies with conventional fixed-gain and linearly adaptive FTDOBs remain limited.
The present work differs from the above studies in several important aspects. First, unlike conventional FTDOBs with fixed gains, the proposed method employs a fuzzy logic–based adaptive mechanism to adjust observer gains online according to both the disturbance estimation error and its rate of change. Second, in contrast to existing adaptive FTDOBs with linear adaptation laws, the fuzzy-based strategy provides greater flexibility in responding to time-varying and high-frequency disturbances. Third, rigorous finite-time stability analysis is provided using Lyapunov theory, and explicit convergence conditions are derived. Finally, extensive simulation studies are conducted to quantitatively compare the proposed approach with fixed-gain and linearly adaptive observers using root mean square error (RMSE) metrics, thereby clearly demonstrating the advantages of the proposed method.
To further clarify the similarities and differences between the proposed approach and existing works, a comparative summary is provided in Table 1.
Method | Observer Type | Gain Strategy | Convergence | Handles High-Frequency Disturbance |
Fixed-gain | Constant | Asymptotic | Limited | |
Fixed-gain | Constant | Finite-time | Moderate | |
Adaptive | Linear adaptation | Finite-time | Improved | |
Adaptive | Fuzzy | Asymptotic/ | Improved | |
Proposed method | FTDOB | Fuzzy adaptive | Finite-time | High |
Consider a general class of nonlinear systems of order with the following dynamics [2]:
| (1) |
where  is the vector of state variables;
is the vector of state variables;  and
and  are smooth nonlinear functions;
are smooth nonlinear functions;  is a bounded unknown disturbance;
is a bounded unknown disturbance;  is the control input;
is the control input;  is the measurable output.
is the measurable output.
Assumptions:
 is
is  ‐times continuously differentiable.
‐times continuously differentiable. is bounded by a known
is bounded by a known .
. is smooth and bounded away from zero:
is smooth and bounded away from zero:  with
with  .
.The fixed‐gain finite‐time disturbance observer of the nonlinear system (1) is given as below [2]:
| (2) |
where  is the estimate of
is the estimate of  ;
;  is the estimate of
is the estimate of  ;
;  denotes the estimation error;
denotes the estimation error;  and
and  are positive observer gains;
are positive observer gains;  is a positive constant;
is a positive constant;  is the hyperbolic tangent function.
is the hyperbolic tangent function.
Despite the effective disturbance estimation and the reduced chattering offered by using a hyperbolic tangent function in the finite‐time disturbance observer, several important limitations persist:
 and the saturation constant must be carefully selected by trial‐and‐error. The estimation performance is highly sensitive to these parameters, and inappropriate tuning may lead to degraded accuracy, instability, or overly aggressive responses. increases convergence speed but may introduce peaking or residual chattering, especially near zero crossings of the estimation error. A small , while providing smoother estimates, significantly slows down the observer’s response time. function, the disturbance estimation error is guaranteed to remain uniformly ultimately bounded (UUB), but not asymptotically convergent to zero. This means the observer cannot fully eliminate the estimation error, especially under persistent disturbances.
and the saturation constant must be carefully selected by trial‐and‐error. The estimation performance is highly sensitive to these parameters, and inappropriate tuning may lead to degraded accuracy, instability, or overly aggressive responses. increases convergence speed but may introduce peaking or residual chattering, especially near zero crossings of the estimation error. A small , while providing smoother estimates, significantly slows down the observer’s response time. function, the disturbance estimation error is guaranteed to remain uniformly ultimately bounded (UUB), but not asymptotically convergent to zero. This means the observer cannot fully eliminate the estimation error, especially under persistent disturbances.These limitations motivate the development of enhanced observers, such as AFTDOB or AFTDOB‐Fuzzy, which incorporate adaptive gain mechanisms to improve robustness, estimation accuracy, and adaptability to varying operating conditions.
To overcome the limitations of the Finite‐Time Disturbance Observer (FTDOB), the fixed observer gains and are replaced with adaptive gains  and
and  , which evolve in real time based on the system’s estimation error dynamics.
, which evolve in real time based on the system’s estimation error dynamics.
Define the estimation error for the highest‐order state:
| (3) |
The adaptive observer is designed as:
| (4) |
where the positive constant  , the adaptive gains and are defined as below:
, the adaptive gains and are defined as below:
| (5) |
where  are positive constants.
are positive constants.
Backstepping control is a recursive, systematic design methodology used to develop stabilizing controllers for nonlinear systems, particularly those with hierarchical or cascaded structures [2], [17], [25]. The authors outline the main design of backstepping control as below [2]:
Define the error coordinate:
| (6) |
where the virtual control laws  are defined:
are defined:
| (7) |
where  are control gains.
are control gains.
The backstepping control law is:
| (8) |
Under Assumptions A1–A3, the closed‐loop system with the proposed controller and AFTDOB ensures that  in finite time.
in finite time.
Define the Lyapunov candidate:
| (9) |
Compute its time derivative:
| (10) |
Backstepping structure yields:
| (11) |
Substitute  into
into  :
:
| (12) |
Also, the observer error dynamics:
| (13) |
So, the derivative of  becomes:
becomes:
| (14) |
Apply Young’s inequality  for each element
for each element  :
:
| (15) |
Therefore,
| (16) |
Replace into (14):
| (17) |
If we choose gains  :
:
| (18) |
Set:
| (19) |
So that,
| (20) |
Apply Young’s inequality
| (21) |
Then:
| (22) |
With  in (4). From Assumption A2, is bounded:
in (4). From Assumption A2, is bounded:  (
( is boundary), and the function is also bounded, so there exist constants
is boundary), and the function is also bounded, so there exist constants  such that
such that
| (23) |
From this we have (a simple square-form bound)
| (24) |
Therefore,
| (25) |
Set positive constants (if gain choice is satisfied):
| (26) |
From
| (27) |
with  .
.
We consider two cases:
 . Then
. Then  yields exponential decay
yields exponential decay  ; exponential decay alone does not imply finite-time convergence. If the dissipation is strengthened to
; exponential decay alone does not imply finite-time convergence. If the dissipation is strengthened to
| (28) |
where  ,
,  .
.
Then, the finite-time upper bound is given as below:
| (29) |
where  is the value of at
is the value of at  .
.
 . Inequality (28) only guarantees ultimate boundedness and not convergence to zero. To recover finite-time decrease one may pick
. Inequality (28) only guarantees ultimate boundedness and not convergence to zero. To recover finite-time decrease one may pick  and define the threshold
and define the threshold  . While
. While  we have
we have  so
so  and the time to reach
and the time to reach  is bounded by
is bounded by
| (30) |
Below further finite-time convergence to zero requires either eliminating the residual  by design or enforcing a global nonlinear dissipation term
by design or enforcing a global nonlinear dissipation term  .
.
To avoid instability with sudden change of disturbances, the adaptive gains with saturation are used:
| (31) |
where  are gain saturation bounds.
are gain saturation bounds.
While AFTDOB enhances performance by adjusting observer gains in response to the estimation error magnitude, it still relies on heuristic tuning of base gains  ,
,  ,
,  , and
, and  . In dynamic or highly nonlinear systems, static adaptation rules may underperform or cause slow convergence. To address this, the authors propose AFTDOB‐Fuzzy that adaptively modifies the observer gains online.
. In dynamic or highly nonlinear systems, static adaptation rules may underperform or cause slow convergence. To address this, the authors propose AFTDOB‐Fuzzy that adaptively modifies the observer gains online.
The proposed fuzzy system accepts two real‐time input signals:
* Error = : estimation error
* dError =  : time derivative of estimation error
: time derivative of estimation error
The fuzzy controller outputs:
* gamma1 =  : adaptive proportional gain.
: adaptive proportional gain.
* gamma2 =  : adaptive nonlinear saturation gain.
: adaptive nonlinear saturation gain.
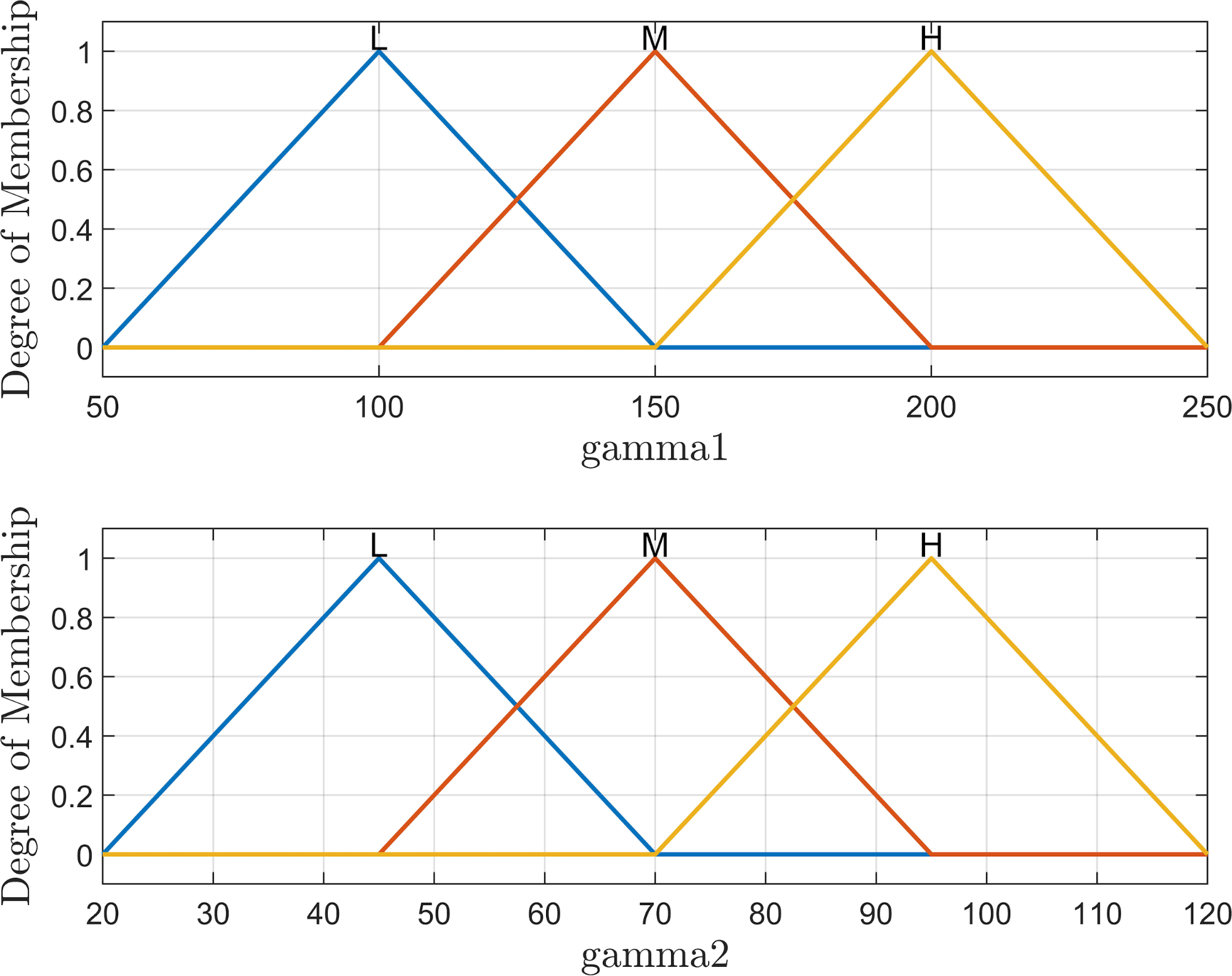
Each input is assigned three Gaussian membership functions: Error (Negative (N), Zero (Z), and Positive (P)) and dError (Negative Derivative (DN), Zero Derivative (DZ), and Positive Derivative (DP)) that are illustrated in Fig. 1. Each output is assigned three trimf membership functions: gamma1 (Low (L), Medium (M), and High (H)) and gamma2 (Low (L), Medium (M), and High (H)) that demonstrated in Fig. 2. The fuzzy rule table is given as Table 2.
The Gaussian function is defined [26], [27]:
| (32) |
where is the center and  is the standard deviation. This choice ensures smooth transitions between fuzzy regions.
is the standard deviation. This choice ensures smooth transitions between fuzzy regions.
Error | dError | gamma1 | gamma2 |
N | DN | H | H |
N | DZ | H | M |
N | DP | M | M |
Z | DN | M | M |
Z | DZ | M | H |
Z | DP | M | L |
P | DN | M | M |
P | DZ | H | M |
P | DP | H | H |
The generic equation for  and
and  [27], [28]:
[27], [28]:
| (33) |
where  are the fuzzy outputs (observer gains);
are the fuzzy outputs (observer gains);  is the singleton output value;
is the singleton output value;  is the firing strength of rule
is the firing strength of rule  , computed as:
, computed as:
| (34) |
with  and
and  being the membership functions of the rule’s input terms.
being the membership functions of the rule’s input terms.
Using the fuzzy logic controller, the observer is rewritten as:
| (35) |
where and are the adaptive observer gains, which serve as the outputs of the fuzzy logic block.
To demonstrate the effectiveness of the proposed algorithm, an example in the previous study is used and the comparison of AFTDOB, AFTDOB‐Fuzzy and FTDOB is given.
The dynamics of the mechanical system are considered [2].
| (36) |
where  and
and  are system states;
are system states;  ,
,  , and
, and  are actual system parameters;
are actual system parameters;  is a bounded unknown disturbance that is given as below:
is a bounded unknown disturbance that is given as below:
| (37) |
The tracking errors:
| (38) |
The virtual control derivative:
| (39) |
The backstepping control law is designed
| (40) |
where  ,
,  ; is the output of the disturbance observer that is defined by three algorithms below:
; is the output of the disturbance observer that is defined by three algorithms below:
| (41) |
where  ,
,  ,
,  .
.
| (42) |
where  ,
,  ,
,  ,
,  , ,
, ,  ,
,  .
.
| (43) |
where .
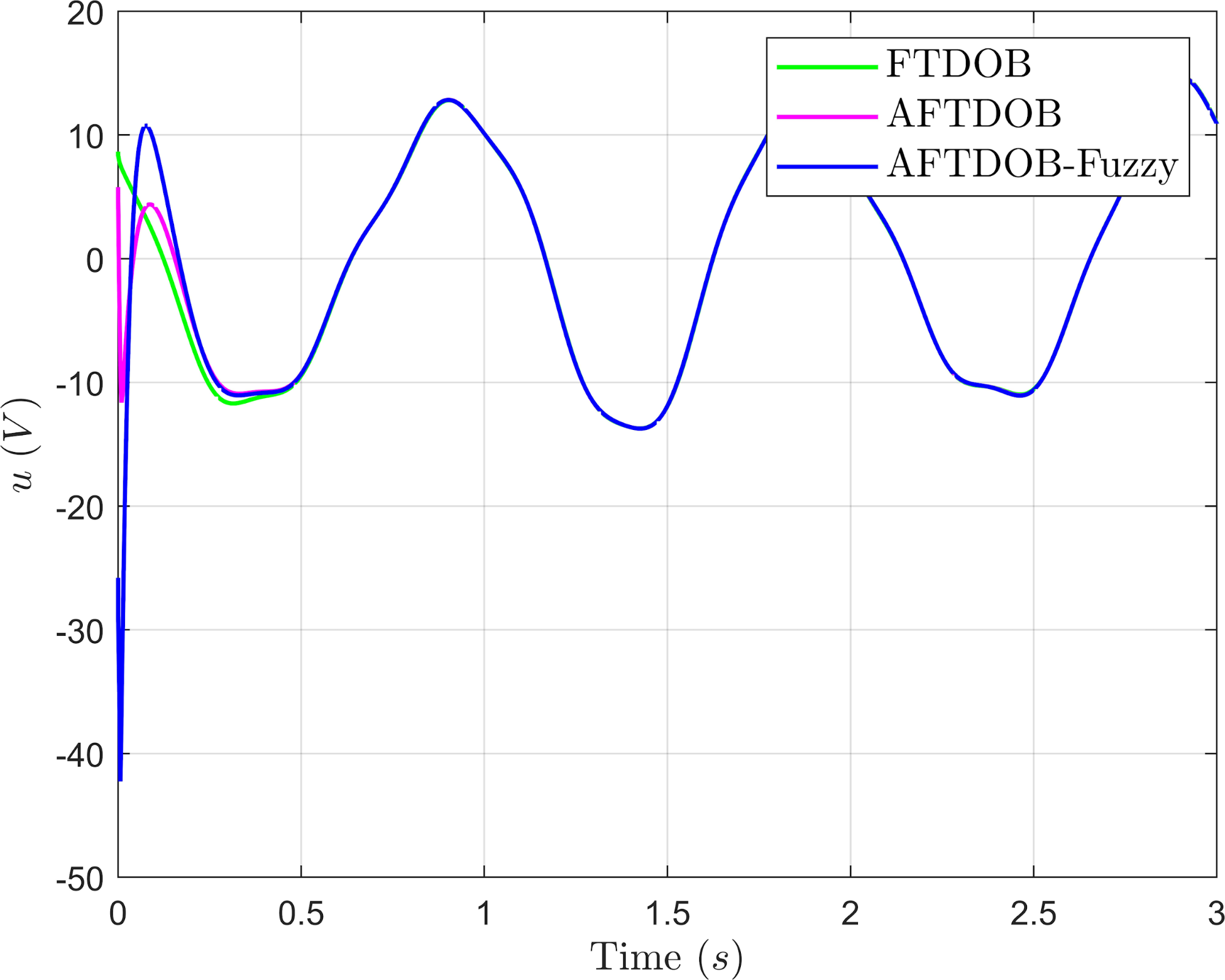
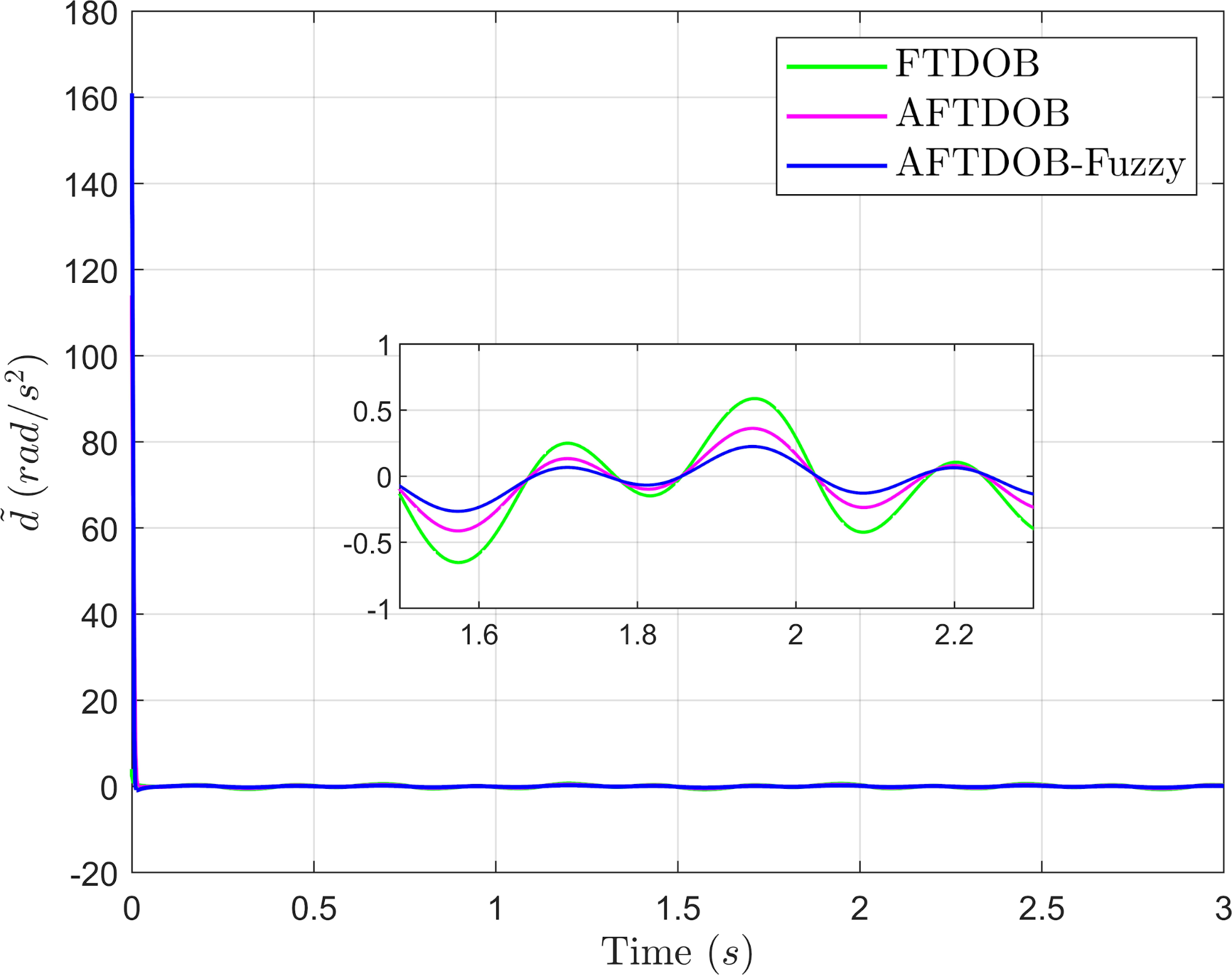
Fig. 3 to Fig. 6 illustrate the system output , the tracking error  , the disturbance estimation error
, the disturbance estimation error  , and control input for all three algorithms.
, and control input for all three algorithms.
and the desired trajectory 
Quantitative comparisons confirm the advantages of AFTDOB‐Fuzzy, which outperforms both baseline methods in terms of tracking accuracy and disturbance estimation robustness.
The Root Mean Square Error (RMSE) [28], [29] is calculated for the tracking error and the disturbance estimation (Let N be the total number of time steps (samples)):
:
| (44) |
:
| (45) |
Quantitatively, the proposed AFTDOB-Fuzzy reduces the tracking error RMSE by approximately 78% and 53% compared with the fixed-gain FTDOB and the linearly adaptive FTDOB, respectively, while the disturbance estimation RMSE is reduced by over 80% and 57%, confirming the superior performance of the fuzzy-based adaptive scheme.
The above results clearly highlight the influence of different gain adaptation mechanisms on disturbance estimation and tracking performance. The fixed-gain FTDOB provides finite-time convergence but exhibits a trade-off between convergence speed and robustness, leading to either slower response or increased oscillations when high-frequency disturbances are present. The linearly adaptive FTDOB improves robustness by adjusting gains online; however, its adaptation capability remains limited when the disturbance varies rapidly. In contrast, the proposed AFTDOB-Fuzzy consistently achieves faster convergence, lower steady-state error, and smoother control input. This improvement is mainly attributed to the fuzzy logic–based gain adaptation, which flexibly adjusts observer gains according to both the magnitude and rate of change of the estimation error. As a result, the proposed method demonstrates superior disturbance rejection capability and reduced sensitivity to gain tuning, as confirmed by the quantitative RMSE comparisons, as shown in Table 3.
Observer |
|
|
FTDOB | 0.1834 | 0.5627 |
AFTDOB | 0.0972 | 0.3395 |
AFTDOB-Fuzzy | 0.0438 | 0.1043 |
This paper investigated finite-time disturbance observer–based control for nonlinear systems and presented a systematic comparison between three observer designs: a fixed-gain finite-time disturbance observer (FTDOB), a linearly adaptive finite-time disturbance observer (AFTDOB), and a fuzzy logic–based adaptive finite-time disturbance observer (AFTDOB-Fuzzy). The objective was to evaluate how different gain adaptation mechanisms influence disturbance estimation accuracy, convergence speed, and robustness under time-varying disturbances.
Finite-time stability of the observer error dynamics was established using Lyapunov analysis, and sufficient conditions for convergence were derived. Simulation results under high-frequency time-varying disturbances demonstrated clear performance differences among the three cases. The fixed-gain FTDOB achieved finite-time convergence but exhibited sensitivity to gain selection and degraded performance under rapidly varying disturbances. The linearly adaptive FTDOB improved robustness and reduced steady-state error; however, its adaptation capability remained limited for high-frequency disturbances. In contrast, the proposed AFTDOB-Fuzzy consistently achieved faster convergence, smoother control input, and significantly lower tracking and disturbance estimation errors. Quantitative evaluation using root mean square error (RMSE) metrics showed that the proposed method reduced tracking and disturbance estimation errors by more than 50% compared with the linearly adaptive observer and over 75% compared with the fixed-gain FTDOB.
Despite these advantages, the present study has several limitations. The performance of the fuzzy-based observer depends on the selection of membership functions and rule bases, which were designed empirically. In addition, the computational complexity is higher than that of fixed-gain observers, and the validation was limited to numerical simulations. Experimental implementation and robustness analysis in the presence of measurement noise were not addressed.
Future research will focus on experimental verification on real-time platforms, systematic tuning methods for fuzzy parameters, and robustness enhancement under sensor noise and actuator constraints. Extensions to networked, multi-agent, and large-scale nonlinear systems will also be investigated.
The authors would like to thank the support of colleagues at the Department of Automation and Computing Techniques, Institute of Control Engineering, Le Quy Don Technical University, Hanoi, Vietnam.
Hoang Duc Long, Enhanced Disturbance Estimation for Tracking Control of Nonlinear Systems Using Adaptive Fuzzy Finite-Time Observers