Journal of Fuzzy Systems and Control, Vol. 4, No 2, 2026 |
Stabilization of Double Inverted Pendulum using LQR-based Information Fusion Fuzzy Control
Truong-Phuong-Nam Pham 1, Le-Thao-Nguyen Nguyen 2, Trong-Bang Tran 3, Dai-An Ly 4, Anh-Phong Nguyen 5,
Van-Tung Dau 6, Nhut-Nam Nguyen 7, Ba-Thien Tran 8, Tri-Bao Tran 9, Dinh-Binh Vo 10, Van-Duc Nguyen 11,
Thi-Ngoc-Thao Nguyen 12, Thanh-Tung Nguyen 13,*
1, 2, 4, 5, 6, 7, 8, 9, 10, 11, 12 Ho Chi Minh City University of Technology and Engineering (HCM-UTE), Ho Chi Minh City (HCMC), Vietnam
3 Department of Mechanical Engineering, Konkuk University, Seoul, Republic of Korea
13 Bach Nghe Ho Chi Minh College, Ho Chi Minh City (HCMC), Vietnam
Email: 1 22151119@student.hcmute.edu.vn, 2 22151031@student.hcmute.edu.vn, 3 bang1111@konkuk.ac.kr,
4 22146066@student.hcmute.edu.vn, 5 22146191@student.hcmute.edu.vn, 6 22146250@student.hcmute.edu.vn,
7 22146176@student.hcmute.edu.vn, 8 22151040@student.hcmute.edu.vn, 9 23142008@student.hcmute.edu.vn,
10 23142009@student.hcmute.edu.vn, 11 23142016@student.hcmute.edu.vn, 12 thaontn@student.hcmute.edu.vn,
*Corresponding Author
Abstract—Modeling the six-state Double Inverted Pendulum on Cart (DIPC) is highly challenging due to its strong nonlinearities and underactuated dynamics. To address this, the system model in this study is derived using a systematic forward-kinematics-based formulation from robotics theory, previously validated for accuracy in both LQR experiments and ANFIS simulations reported in earlier work. Building on this validated foundation, the present study proposes an Information Fusion Fuzzy Logic Controller (IF-FLC) to overcome the curse of dimensionality commonly encountered when designing fuzzy controllers for high-order systems. The method compresses the six measured state variables into two synthesized linguistic inputs—Synthesized Error (E) and Error Change (EC)—allowing the construction of an efficient 49-rule fuzzy controller without compromising essential system dynamics. Simulations incorporating encoder quantization and realistic measurement constraints show that the proposed IF-FLC provides stable balancing performance and improved robustness compared with the LQR benchmark. The results indicate that information-fusion-based fuzzy design is a promising approach for reducing controller complexity while maintaining high performance, offering a practical pathway for implementing intelligent control strategies on nonlinear and underactuated systems such as the DIPC.
Keywords—DIPC; Fuzzy Logic Control; Information Fusion; LQR; SIMO System; Forward Kinematics
The double-linked inverted pendulum on cart (DIPC) represents a more complex extension of the classical inverted pendulum, a system long recognized as a benchmark model in nonlinear and modern control theory [1], [2]. With two coupled pendulum links mounted on a horizontally actuated cart, the DIPC exhibits strong nonlinearities, underactuation, and inherent instability, making it an important platform for evaluating advanced control strategies. Its dynamic structure also resembles a variety of real-world engineering systems, including humanoid locomotion, bipedal balance mechanisms, robotic manipulators, and aerospace stabilization systems [3], [4].
A wide range of control strategies has been applied to stabilize the DIPC. Linear optimal controllers such as the Linear Quadratic Regulator (LQR) offer effective local stabilization around the equilibrium and have been successfully demonstrated in several studies [5]-[9]. However, due to their reliance on linearized models, LQR controllers often perform poorly when the system experiences pronounced nonlinearities, modeling uncertainties, or external disturbances. This limitation has motivated growing interest in intelligent control approaches. Among these, fuzzy logic control (FLC) is known for its ability to handle nonlinear dynamics and uncertainty without requiring exact system models [10], [11]. Nonetheless, traditional FLC faces significant difficulty when applied to high-dimensional systems such as the six-state DIPC, due to the rapid expansion of rule bases—an issue commonly referred to as the “curse of dimensionality” [12].
Several studies have attempted to overcome this challenge. Neuro-fuzzy systems such as ANFIS [13], [14] provide ways to learn rule bases automatically from data, while other approaches focus on dimensionality reduction. One promising direction is the use of information fusion techniques, which combine multiple state variables into a reduced set of synthesized linguistic inputs. Such fusion-based fuzzy controllers have been shown to considerably reduce rule-based size while maintaining essential system behavior, as demonstrated in [15].
Although these approaches have shown encouraging results, several limitations still remain. Many existing methods require large training datasets, involve computationally intensive optimization procedures, or are mainly validated on lower-order inverted pendulum systems. Furthermore, only limited studies have investigated information-fusion-based fuzzy control for highly nonlinear and underactuated systems such as the DIPC. In particular, the information fusion strategy reported in [15] mainly focused on reducing fuzzy-controller complexity for a conventional DIPC formulation and did not incorporate optimal-control-based state prioritization, encoder quantization effects, or forward-kinematics-based system modeling. Consequently, the integration of information fusion with model-based state weighting for realistic DIPC implementation remains insufficiently explored.
In addition to control design challenges, accurate system modeling plays a crucial role in achieving reliable stabilization performance. While most prior works employ Euler–Lagrange formulations, our previous study introduced a forward-kinematics-based modeling framework derived from robotics principles [16], offering a systematic and structurally intuitive means of representing the DIPC dynamics. This model was validated through simulation studies incorporating encoder quantization [17], together with real-time ANFIS-based control experiments [18], confirming its practical applicability.
Motivated by the above research gaps, the present study develops an LQR-based Information Fusion Fuzzy Logic Controller (IF-FLC) for the DIPC system. Unlike conventional fuzzy controllers that directly process all state variables, the proposed method compresses the six-dimensional state vector into two synthesized inputs—error (E) and error change (EC)—through an information-fusion mechanism derived from the LQR state-feedback gain matrix. By incorporating LQR-based weighting into the fusion process, the proposed controller preserves the dominant dynamic characteristics of the system while significantly reducing fuzzy-controller complexity. This strategy enables the construction of a compact 49-rule fuzzy controller without suffering from dimensionality explosion.
The primary objective of this research is to investigate whether the proposed reduced-order fuzzy architecture can achieve stabilization performance comparable or superior to that of the conventional LQR controller while maintaining computational efficiency suitable for practical implementation. To better reflect realistic operating conditions, the controller is evaluated under encoder quantization and discrete-time sampling constraints within the MATLAB/Simulink environment.
The main contributions of this study can be summarized as follows:
The contribution of this research is the development and validation of a computationally efficient information-fusion-based fuzzy controller for the DIPC system, demonstrating that dimensionality reduction through information fusion enables high-performance fuzzy control while avoiding the curse of dimensionality inherent in high-order nonlinear systems.
In this study, building upon the previously established dynamic modeling framework and the successful development of the LQR controller, an overview of the DIPC system is revisited. The design methodology of the IF-FLC controller is then presented, followed by the construction of the system in a simulation environment and a comprehensive performance evaluation.
A complete derivation of the nonlinear dynamic model for the DIPC system was presented in our previous work [17], where the forward-kinematics-based formulation was developed and validated through simulation and real-time experiment [18]. In this study, the same model is adopted as the foundation for the controller design. For completeness, a brief summary of the mathematical structure is provided below, while the full derivation can be found in [17], [18].
The overall configuration of the DIPC system is shown in Fig. 1, and the corresponding reference coordinate frames are presented in Fig. 2. The parameters of the system are shown in Table 1.
The masses of the cart and the two-pendulum links were determined through direct measurement, whereas the moments of inertia were computed based on standard rigid-body formulations. The center-of-mass locations for each link were identified experimentally to ensure that the model closely represents the actual hardware behavior. Combined with the coordinate frame definitions shown in Fig. 1 and
Fig. 2, these parameters form the basis for the kinematic description of the system, which in turn enables a consistent development of the subsequent dynamic model.
As detailed in our earlier works [17], [18], the system’s kinematic structure was formulated using the forward-kinematics framework presented by Craig [16]. This formulation naturally links the generalized coordinates to the geometric configuration of the mechanism, which simplifies the evaluation of both kinetic and potential energy terms. An additional benefit of this modeling strategy is its suitability for systems with higher degrees of freedom, where conventional approaches may become cumbersome.
Parameters | Description | Values |
| Link 1 deviation angle |
|
| Link 2 deviation angle |
|
| Cart position |
|
| Length of link 1 |
|
| Length of link 2 |
|
| The mass of cart |
|
| The mass of link 1 |
|
| The mass of link 2 |
|
| The moment of inertia of cart |
|
| The moment of inertia of link 1 |
|
| The moment of inertia of link 2 |
|
| Length of link 1 |
|
| Length of link 2 |
|
| Link 1 center of mass distance from the pivot |
|
| Link 2 center of mass distance from the pivot |
|
| Pulley pitch diameter radius |
|
| Acceleration of gravity |
|
| Applied force on the cart |
|
In this section, we provide a brief recap to ensure continuity for the controller design. Building upon the Euler–Lagrange framework established in [17], the nonlinear state-space representation of the DIPC system can be written in the following general form:
| (1) |
Where:
| (1) |
 : Applied force on cart,
: Applied force on cart,  : Torque acting on the first pendulum,
: Torque acting on the first pendulum,  : Torque acting on the second pendulum.
: Torque acting on the second pendulum.
The acceleration terms can be obtained by rearranging the state-space equations, yielding:
| (2) |
Where:

By substituting these components into (2), we get:
| (3) |
The details of the system’s linearization and controllability assessment were thoroughly discussed in our previous publications [17].
When attempting to apply a classic FLC to a complex, high–degree-of-freedom nonlinear system like the DIPC, several major obstacles arise. First, the system’s dynamics involve multiple interconnected state variables — including cart position/velocity and two pendulum angles plus their angular velocities — producing strong nonlinear coupling, sensitivity to initial conditions, and pronounced dependency on disturbances. Capturing the full behavior of such a system with a standard FLC would require a very large rule base to cover all significant regions of the state space. Second, as the number of inputs increases (or fuzzy sets are refined for better precision), the rule base grows combinatorially, making its design, tuning, and maintenance extremely difficult and computationally expensive. As a consequence, a conventional FLC for DIPC often ends up either unmanageably large or insufficiently robust across all operating conditions.
To address these limitations, we propose a hybrid control philosophy that blends fuzzy logic with a model-based baseline controller — a concept often referred to as information-fusion FLC (IF-FLC) [15]. Instead of attempting to cover the entire high-dimensional state space exhaustively, the controller operates on a reduced set of synthesized or “key indicator” variables. This allows the fuzzy component to remain compact, while the baseline controller (for example, LQR) handles nominal stabilization under normal conditions. The advantages of this hybrid strategy include:
Therefore, this hybrid fuzzy–model approach leverages the strengths of both classical control and intelligent adaptation, while avoiding the impracticalities that typically hinder the application of standard FLC to high-order nonlinear systems such as the DIPC.
In our prior work [17], [18], we derived the optimal full-state feedback gain matrix K using the LQR approach for the DIPC system. In the current study, this gain matrix serves as a foundational element for the proposed IF-FLC design.
| (4) |
Where:

Based on (4), we obtain the state-feedback gain matrix for the DIPC system. From this matrix, the controller’s action can be decomposed into two principal components: feedback proportional to the current values of the state variables and feedback proportional to their rates of change. By normalizing these components using appropriate weighting factors, we introduce a hierarchical prioritization among the states — assigning descending importance to the second pendulum’s angle, then the first pendulum’s angle, and finally the cart position. On this basis, the following expression is constructed:
| (5) |
By substituting the values from (4) into (5), we obtain:
| (6) |
At this point in the design, the original six-dimensional state vector is reduced to two synthesized quantities: a combined error measure (E) and its corresponding rate of variation (EC).
| (7) |
The architecture of the proposed IF-FLC controller is presented in Fig. 3.
MATLAB’s Fuzzy Logic Toolbox is employed to implement the fuzzy controller.
In the Mamdani-type fuzzy controller shown in Fig. 4 developed for the DIPC system, the inference parameters in MATLAB are configured as follows:
Given the highly nonlinear, inherently unstable, and disturbance-sensitive nature of the DIPC, the choice of fuzzy inference mechanisms plays a critical role in ensuring stable and robust control behavior. In this study, a Mamdani inference framework combined with centroid defuzzification is adopted. These settings are not chosen arbitrarily; rather, they are selected to suit the nonlinear dynamics of the DIPC and to provide smooth, stable, and well-behaved control action across the operating range.
Fig. 4 and Fig. 5 present the membership functions assigned to the input variables E, EC, and the controller output. Each input and output variable are partitioned into seven triangular membership functions, defined as:
All variables are normalized onto the common interval [−3, 3], which greatly simplifies the controller design. Without normalization, each state variable would require a distinct universe of discourse due to differences in scale and physical magnitude. By projecting the variables onto a unified and symmetric domain, the membership functions become consistent across variables, allowing tuning to focus on function shape rather than absolute magnitude. Moreover, adopting a compact and fixed input domain reduces computational effort - an important consideration for potential real-time implementation.
As noted in [15], the rule set in Table 2 originates from expert-derived heuristics and accumulated practical experience.
EC E | NB | NM | NS | ZE | PS | PM | PB |
NB | NB | NB | NB | NM | NM | NS | ZE |
NM | NB | NB | NM | NM | NS | ZE | PS |
NS | NB | NM | NM | ND | ZE | PS | PM |
ZE | NM | NM | NS | ZE | PS | PM | PM |
PS | NM | NS | ZE | PS | PM | PM | PB |
PM | NS | ZE | PS | PM | PM | PB | PB |
PB | ZE | PS | PM | PM | PB | PB | PB |
The simulation environment is implemented in MATLAB/Simulink 2020a with a sampling period of 0.005 s. The initial angular displacement of the first pendulum link is set to 0.1 rad (approximately 5.7°), while the second link is initialized at 0.15 rad (approximately 8.6°).
To better reflect real-world operation, the state variables in the simulation are obtained through a virtual sensing process that mimics the behavior of the physical encoders (Fig. 7 and Fig. 8).
The overall Simulink model of the DIPC system is presented in Fig. 6 and the overall model using the IF-FLC controller is presented in Fig. 9.
The fusion block is shown in Fig. 10, consistent with the formulation introduced in the theoretical section. In this stage, the system state variables are first weighted by the LQR gain matrix K and subsequently grouped into the two synthesized indicators, E and EC. Before entering the fuzzy controller, both quantities are normalized to the interval [−3, 3] to match the predefined domains of the membership functions and ensure proper inference operation.
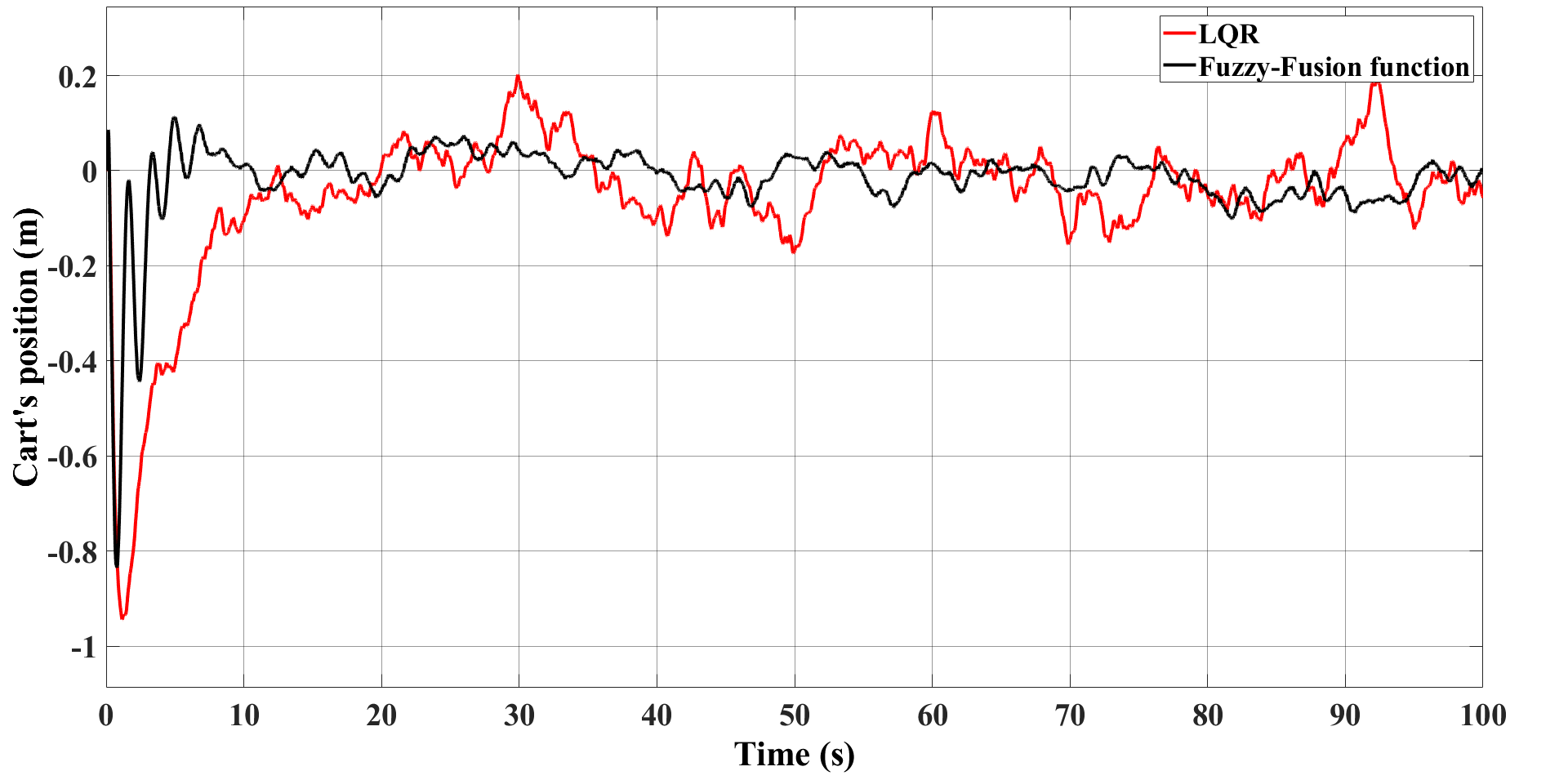
The cart position response in Fig. 11 shows that, due to the initial angular deviations of both pendulum links, the actuator produces a large control force to drive the system back toward the vicinity of the upright equilibrium. This initial corrective action leads to noticeable oscillations of the cart, which subsequently diminish as the system stabilizes, with the motion settling within approximately ±0.2 m - a range that remains acceptable and safe for operation.
A clear performance advantage of the IF-FLC controller over the LQR controller can also be observed. The cart’s overshoot under IF-FLC is reduced to about 0.8m, compared to nearly 0.95 m when using LQR. Furthermore, once the system approaches equilibrium, the residual cart oscillations under IF-FLC remain small, around 0.03m, in contrast to roughly 0.15 m with the LQR controller. These results indicate that the IF-FLC controller enhances the system’s stability and achieves significantly lower steady-state oscillations compared with the conventional LQR approach.
Fig. 12 and Fig. 13 present the angular responses of pendulum 1 and pendulum 2, respectively. For the first pendulum, the oscillation amplitude remains within approximately (−0.05, 0.04) rad when controlled by the LQR, whereas the IF-FLC further reduces this range to about (−0.03, 0.03) rad. Similarly, for the second pendulum, the angular deviation stays within (−0.02, 0.02) rad under LQR control and is reduced even further to (−0.01, 0.01) rad with the IF-FLC. These results confirm that both controllers maintain stable responses for the two pendulum links.
It is also noticeable that the IF-FLC produces slightly larger transient oscillations during the initial recovery phase as the pendulums move toward the upright equilibrium. However, once the system settles near the equilibrium region, the IF-FLC achieves significantly smaller steady-state oscillations compared with the LQR controller. This indicates that the IF-FLC provides superior damping characteristics and improved stability around the upright position.
The control force is converted into an equivalent torque by multiplying it by the pulley pitch radius, allowing an estimation of the torque applied to the system. As illustrated in Fig. 14, the resulting torque ranges approximately from −0.15 to 0.15 Nm. The IF-FLC controller generates a comparatively stronger actuation on the DIPC, which accounts for the slightly larger transient oscillations in the pendulum angles during the initial stabilization phase. However, once the system moves close to the upright equilibrium, the increased actuation enables the IF-FLC to achieve a more stable response than the LQR controller. These observations provide valuable insight for hardware tuning and for ensuring that the actuator capabilities are sufficient to meet the performance demands of the system.
Table 3 summarizes the RMSE values used to quantitatively assess and compare the system responses under the IF-FLC and LQR controllers. These metrics provide additional evidence supporting the performance differences highlighted in the preceding discussion.
Response of system | Controller | |
LQR | IF-FLC | |
Cart (m) | 0.1608 | 0.0816 |
Link1 (rad) | 0.0362 | 0.0468 |
Link2 (rad) | 0.0145 | 0.0130 |
Torque (Nm) | 0.0378 | 0.0777 |
Based on Table 3, a clear difference in the response quality of the DIPC system under the LQR and IF-FLC controllers can be observed through the RMSE index. For the cart motion, the IF-FLC controller achieves a significantly lower RMSE than the LQR (0.0816 compared to 0.1608), indicating improved tracking accuracy and reduced position oscillations. In contrast, for the angular responses of Link 1 and Link 2, the RMSE values of the two controllers are relatively similar. This can be attributed to the larger initial oscillations exhibited by the IF-FLC, which increase the RMSE of both pendulums and the control signal during the transient phase. However, when considering long-term operation, the IF-FLC demonstrates much smaller oscillation amplitudes and superior steady-state stability compared to the LQR controller. Overall, these results confirm that the IF-FLC provides superior performance in cart positioning and certain nonlinear state responses, while also highlighting differences in control energy characteristics relative to the LQR controller, in agreement with the preceding discussion.
This study proposed an LQR-based Information Fusion Fuzzy Logic Controller (IF-FLC) for stabilizing a Double Inverted Pendulum on Cart (DIPC) system. By employing an information-fusion mechanism derived from the LQR gain matrix, the original six-dimensional state vector was reduced to two synthesized fuzzy variables, enabling the implementation of a compact 49-rule fuzzy controller while preserving the dominant dynamic characteristics of the system.
Simulation results demonstrated that the proposed IF-FLC successfully stabilized the DIPC under encoder quantization and discrete-time sampling conditions. Compared with the conventional LQR controller, the IF-FLC reduced the cart-position RMSE from 0.1608 m to 0.0816 m, corresponding to a 49.3% improvement. Furthermore, the controller produced smaller steady-state oscillations of both pendulum links, indicating enhanced damping characteristics and improved long-term stabilization performance. These results suggest that the proposed information-fusion strategy effectively mitigates the dimensionality problem commonly encountered in fuzzy control of high-order nonlinear systems.
The study also provides additional validation of the forward-kinematics-based DIPC modeling framework combined with the Euler–Lagrange formulation, offering a systematic representation suitable for intelligent control applications. Future work will focus on real-time experimental implementation, robustness evaluation under uncertainties and disturbances, and adaptive tuning methods for the fuzzy inference system. Overall, the proposed IF-FLC demonstrates a practical balance between controller complexity and nonlinear stabilization performance for high-order underactuated systems.
This research was funded by Ho Chi Minh City University of Technology and Engineering (HCM-UTE), Vietnam, under grant No. SV2026-434. We want to give thanks to Ph.D. Van-Dong-Hai Nguyen (HCM-UTE) due to his supervision for this research. We, authors, are grateful to these supports.
Truong-Phuong-Nam Pham, Stabilization of Double Inverted Pendulum using LQR-based Information Fusion Fuzzy Control