Journal of Fuzzy Systems and Control, Vol. 4, No 1, 2026 |
Hybrid Predictive Fuzzy-AI Energy Management with SOC-Constrained Optimization for
Wind-Driven Microgrids
Arunava Chatterjee 1, *
1 Department of Electrical Engineering, Raghunathpur Government Polytechnic under Department of Technical Education and Training, Government of West Bengal, Purulia, India
Email: arunava7.ju@gmail.com
*Corresponding Author
Abstract—Small-scale wind energy systems are increasingly being installed in distributed renewable systems and microgrids. These systems display significant power variability due to the uncertain nature of wind speed. Such fluctuations often lead to DC-link voltage deviations and irregular battery charging cycles. Thus, they can reduce overall system reliability and storage lifespan. This paper proposes a hybrid predictive Fuzzy-AI supervisory control strategy for energy management in a wind-battery microgrid. The supervisory layer integrates short-term wind power forecasting with fuzzy logic-based battery scheduling while enforcing state-of-charge (SOC) constraints. A multi-objective formulation is adopted to regulate DC-link voltage and simultaneously minimize battery current stress. The proposed controller generates adaptive battery current references through a rule-based inference mechanism with predictive information. Comparative results with conventional PI control and AI-only scheduling demonstrate improved voltage stability, reduced RMS battery current, and better SOC control. Experimental observations obtained from a small-scale wind generation setup further support the effectiveness of the proposed approach.
Keywords—Artificial Intelligence; Cloud Computing; Internet of Things; State of Charge Optimization; Wind Energy Conversion
Wind energy has become an important component of modern distributed power systems. In addition to large grid-connected wind farms, small wind generation units are widely used in decentralized applications such as educational laboratories, campus microgrids, and rural renewable installations [1]. Although the rated power of these systems is relatively small, their operation is characterized by strong nonlinearities and stochastic input conditions. Since the mechanical power extracted from wind varies with the cube of wind velocity, even modest wind fluctuations can lead to significant changes in generated electrical power [2], [3]. These variations often propagate through the energy conversion chain and appear as voltage disturbances in the DC-link of the power electronic interface. The wind energy systems typically operate in fractional ranges and often useful for microgrids. However, for higher kW ranges, they are used in grid connected applications. For such systems, various generators such as doubly-fed induction generators (DFIG) are often used other than conventional three-phase squirrel-cage ones [4]-[6]. In case of three-phase generators, the primary focus is to produce uninterrupted and stable generation with change in wind speeds and loads [7]-[9], which is challenging. Conventional control strategies involve the use of proportional-integral (PI) controllers for controlling the generated voltage mainly by adjusting the DC-link voltage [10]. The PI controllers can effectively maintain local stability, they lack predictive capability. It is also found that these controllers often respond after the disturbance have occurred. With increased availability of sensor data and internet-of-things (IoT) controller enabled monitoring techniques, renewable energy-based systems now generate huge data and operational information [11]-[14]. Artificial intelligence (AI) techniques can exploit these data to provide short-term forecasts or deciding adaptive scheduling.
Fuzzy logic and neural network have also proven to be effective in renewable energy applications as it can handle uncertainties associated with wind generations effectively [15]-[17]. Fuzzy controllers provide smooth and robust responses under varying weather conditions by integrating heuristic rules derived from system behavior [18]-[20].
Considering these controllers, this work develops a hybrid supervisory framework that combines predictive AI techniques with fuzzy energy management. The proposed approach uses short-term power forecasting to anticipate generation imbalance. Moreover, a fuzzy inference system determines appropriate battery current references within allowable SOC limits for battery charging and discharging optimization. The main contributions of this research work are:
Suitable simulations backed by experimental results validate reduced battery stress and improved convergence characteristics compared to conventional controllers for the proposed scheme.
This paper is structured as Section II, which discusses the proposed system architecture. The wind energy conversion model, DC-link and converter dynamics and battery model and SOC are explained in this Section. Further, Section III discusses problem formulation. In Section IV. the hybrid predictive fuzzy-AI model is detailed with cloud integrated monitoring. Section VI is used for simulation and experimental results. Finally, conclusion is drawn in Section VI.
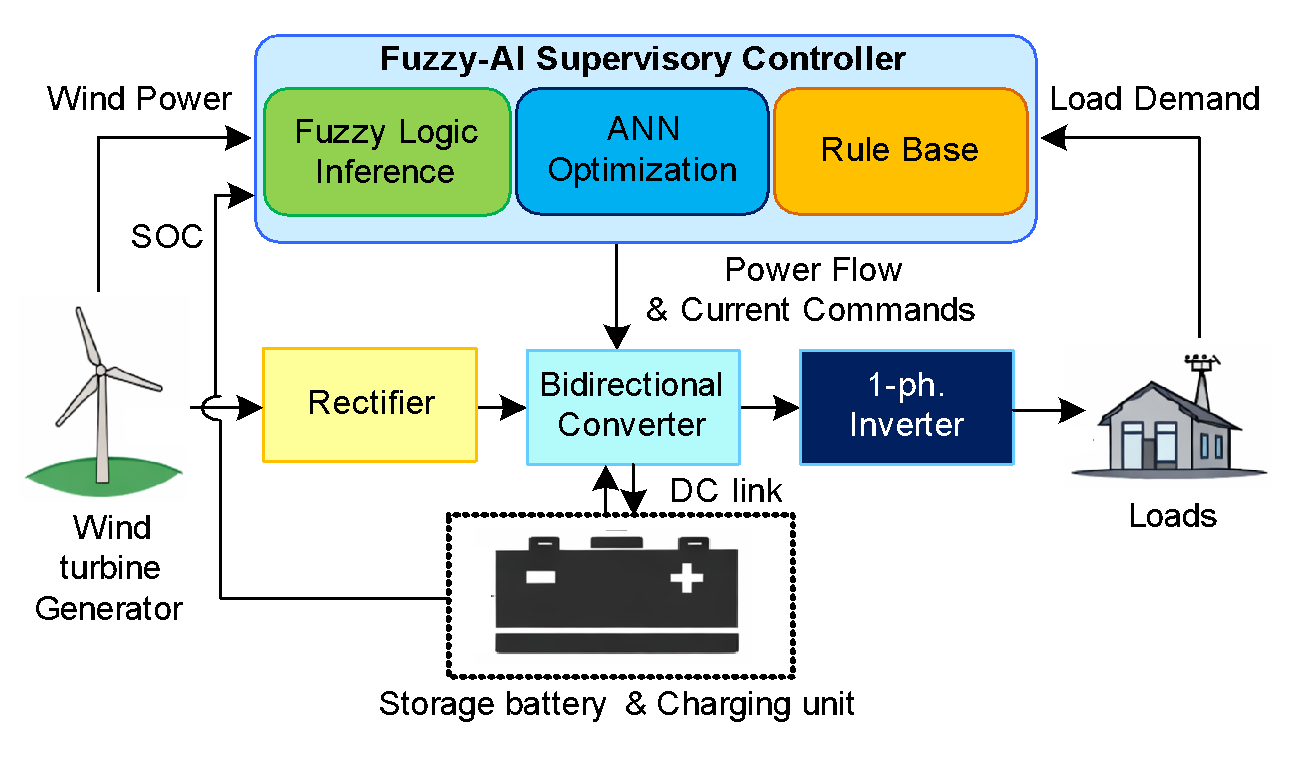
The proposed energy management framework is implemented using wind turbine generator and battery. This microgrid structure consists of a wind turbine coupled to a three-phase squirrel cage induction generator, a diode bridge rectifier interface, and a DC-link with bidirectional converter. The system also has a battery and charge controller unit and an inverter supplying local load. Fig. 1 shows the block diagram of the proposed system with controller.
The mechanical power from a wind turbine is given as,
| (1) |
where,  is air density (kg/m3), A is the sweep area of turbine,
is air density (kg/m3), A is the sweep area of turbine,  is power coefficient and Vω is speed of moving wind. Also tip speed ratio of wind turbine is denoted as
is power coefficient and Vω is speed of moving wind. Also tip speed ratio of wind turbine is denoted as  , where
, where  as rotor speed and R is turbine blade radius. The turbine pitch angle is denoted as β. The electrical power delivered by the generator is,
as rotor speed and R is turbine blade radius. The turbine pitch angle is denoted as β. The electrical power delivered by the generator is,
| (2) |
Vp and Ip are the phase voltage and current respectively with cosθ as power factor. Mechanical dynamics of the rotating generator is given as,
| (3) |
where, J is system inertia of turbine and generator, Tm and Te are mechanical and electrical torques respectively.
The generator rectified output is connected to DC link capacitor. Variation in load or generation appears as transients in DC-link voltage. The voltage dynamics of capacitor connected DC link is,
| (4) |
where, CDC and VDC are capacitance of DC link and link voltage respectively. The current terms are denoted for rectifier, load, and battery respectively. The supervisory controller controls the DC voltage regulation by adjusting battery current through the bidirectional converter. The regulated DC bus supplies power to a battery storage system. This is done through a non-isolated, buck-boost type bidirectional converter. During surplus generation, the converter operates in buck mode to charge battery. The converter switches to boost mode during insufficient generation supplying energy from battery. The AC loads are supplied through a single-phase inverter driven at constant frequency of 50 Hz.
The state of charge (SOC) provides an estimate of the battery stored energy at a particular time. It is modelled as,
| (5) |
where, battery capacity in Ah is given as Cbat. SOC (0) indicates the initial SOC of the battery at time t = 0. The variable τ is intermediate time variable. The terminal voltage of the battery is expressed as,
| (6) |
where, Voc is open circuit voltage which is dependent on SOC and Rint is internal resistance of battery. The battery SOC is restricted to predefined values for better battery health. The (1)-(6) are derived from standard wind energy conversion and battery modeling frameworks as reported in [1], [9], and [17].
The primary objective of the supervisory controller is to maintain DC-link voltage to the set reference value. Also, it must limit battery stresses and avoid excessive charging and deep discharge. The objectives are formulated with a multi-objective performance index.
| (7) |
where, Vref denotes the desired DC-link voltage and  represents the instantaneous power difference between generation and load demand. The weighting coefficients α, β and γ are used to penalize large voltage deviations, large battery currents and the difference in power respectively. The supervisory control task can therefore be interpreted as minimizing the cost function J and satisfying the SOC constraints.
represents the instantaneous power difference between generation and load demand. The weighting coefficients α, β and γ are used to penalize large voltage deviations, large battery currents and the difference in power respectively. The supervisory control task can therefore be interpreted as minimizing the cost function J and satisfying the SOC constraints.
The multi-objective function in (7) is minimized through the supervisory fuzzy-AI control law rather than by direct numerical optimization. The weighting coefficients are selected based on priority of the system. The control objective is translated into a rule-based decision mechanism,
| (8) |
where,  represents the nonlinear fuzzy inference mapping approximating the minimization of (7).
represents the nonlinear fuzzy inference mapping approximating the minimization of (7).  is rate of change of SOC. The fuzzy controller provides a real-time heuristic solution aligned with the objective function instead of analytically solving (7).
is rate of change of SOC. The fuzzy controller provides a real-time heuristic solution aligned with the objective function instead of analytically solving (7).
The proposed supervisory control combines a predictive forecasting model with a fuzzy rule-based energy management.
Short-term prediction of wind power gives useful information for determining and anticipating future energy imbalances [15]. A regression-based predictive model is used to estimate the wind power output,
| (9) |
where the function represents the trained prediction model using historical wind and power data. This assists the supervisory controller in preparing corrective actions before occurrence of large disturbances. The predictive model is implemented using a feedforward ANN with 1 hidden layer of 10 neurons, sigmoid activation and training is done using the Levenberg-Marquardt algorithm. The dataset consists of 2000 samples (70% training, 30% validation). The model complexity is O(n·h), where n is input size and h is hidden neurons.
The fuzzy supervisory controller determines the battery reference current using input variables of ΔP, battery SOC and the rate of change of SOC. Each input variable is represented by linguistic membership functions Low (L), Medium (M) and High (H). A set of heuristic rules define the control behavior. If the available wind power exceeds the load demand and the battery SOC is low, the controller commands a strong charging current for charging the battery. Conversely, if the battery SOC is high and the system observes a generation deficit, the controller restricts further discharge. Similar rules are framed for the fuzzy set. The system evaluates all applicable rules and creates continuous control output through centroid defuzzification. For generating the membership functions (MFs), each input variable is defined over normalized space [-1,1], with triangular MFs,
| (10) |
where, parameters a, b, c and d are tuned empirically. These variables are a = lower bound (start of membership), b = left peak start/rising edge, c = right peak/falling edge, d = upper bound (end of membership) for chosen triangular MF. The Table 1 below shows the rule base for the problem. The fuzzy controller uses two primary inputs: power mismatch ΔP and SOC. The rule base is designed to ensure power balance while maintaining battery health. Charging is prioritized especially at low SOC levels when generation exceeds demand. During power deficit, controlled discharging is applied with stronger action permitted at higher SOC levels. The rate of change of SOC is incorporated as a secondary input to modulate aggressive control. This improves dynamic response during rapid charging or discharging conditions.
ΔP/SOC | Low | Medium | High |
High (H) | Strong charge | Charge | Mild charge |
Medium (M) | Charge | No action | Discharge |
Low (L) | No action | Discharge | Strong discharge |
The output linguistic variables from Table 1 are mapped to battery current reference levels as,
where, Imax is the maximum allowable battery current (20 A, based on rated capacity of 48 V battery and converter).
The rule base encodes system heuristics which ensures energy balance while respecting SOC constraints. The output for the fuzzy system is obtained by defuzzification using centroid method,
| (11) |
where,  represents the aggregate of membership value of the ith rule after fuzzy inference and
represents the aggregate of membership value of the ith rule after fuzzy inference and  is corresponding crisp output value of battery current reference. This formulation computes a weighted average of all rule outputs ensuring smooth control.
is corresponding crisp output value of battery current reference. This formulation computes a weighted average of all rule outputs ensuring smooth control.
The supervisory control maintains bounded operation by restricting the battery current as,
| (12) |
It also helps in maintaining SOC limits. DC-link voltage remains in bounds for disturbances as both energy storage and current flow are constrained. The bounded constraint ensures prevention of battery overcurrent damage, converter safe operating limits and stability of DC-link voltage dynamics. Moreover, the constraint also limits excessive control action thereby improving convergence of cost function without affecting optimality.
In the proposed system, the wind speed, DC-link voltage, battery SOC, current and temperature are periodically monitored and transferred to a cloud server. This is done using embedded communication which is an application of internet-of-things (IoT) often used with monitoring systems [21]-[23]. Proper communication protocol such as message queuing telemetry transport (MQTT) [24]-[26] is used for communication. The IoT hardware architecture consists of sensors for wind speed, DC voltage, SOC and battery current. Edge controller is used for local fuzzy-AI control. The cloud layer is used for data storage and analytics. The control remains local to avoid latency.
The cloud platform stores data and provides long term storage with visual tools for operators [27]. Similar AI and supervisory control approaches can also benefit from cloud platform usage for large data analytics [28]-[30]. Historical datasets can also be used periodically to retrain the forecasting model with the supervisory controller in such cases. For the proposed control, real-time control is used locally to ensure fast response and reliability. The cloud layer on the other hand supports supervisory analysis and optimization of performance.
The proposed system is first simulated using MATLAB and further it is validated using experimental studies on a laboratory-based model. The generator is modelled using a 1kW three-phase induction generator coupled to a wind turbine. The generated voltage is connected to a rectifier unit. The rectified voltage is boosted to 350 V DC bus for connection to the inverter. A 48 V battery bank is linked using a bidirectional DC-DC buck-boost converter. A single-phase inverter of 1 kW is connected to the system to supply the loads. A programmable load bank of 900 W is used to simulate the system load. The system also employs IoT aided data acquisition module whose sampling rate is 1s.
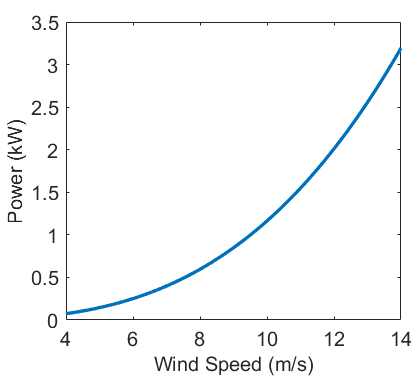
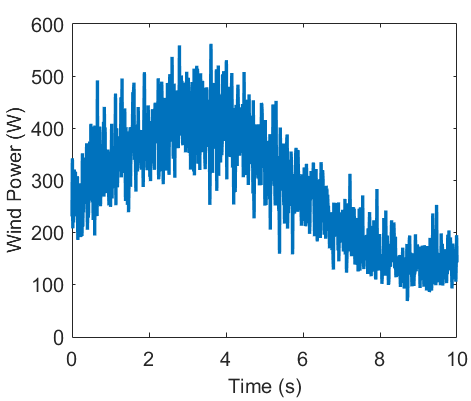
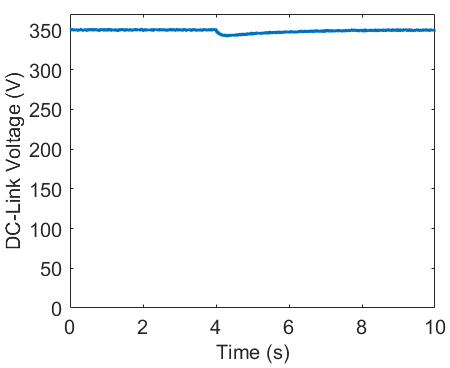
Fig. 2 shows the wind power non-linear behavior with change in wind speed. The cubic relation is shown in the figure below. Fig. 3 shows the wind power variation with time. The non-linear behavior is further shown in the figure. Fig. 4 shows the variation of DC-link voltage with change in load from half-rated value to rated value. With such step change at 4s, the voltage is quickly restored to reference value within 1.5s as observed from the study.
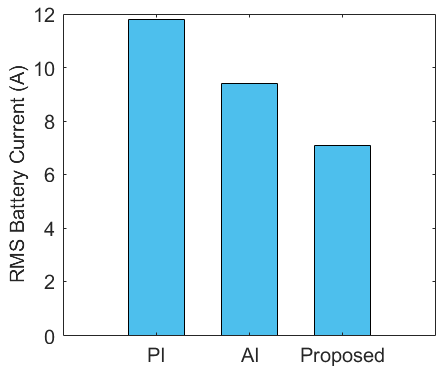
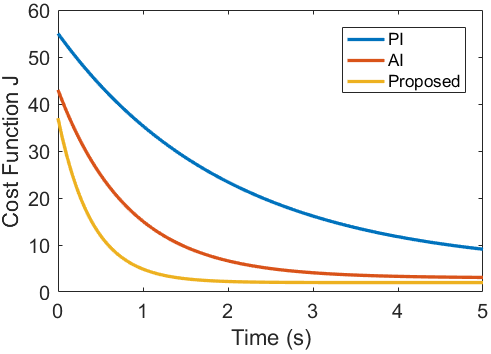
Fig. 5 below shows the comparison of battery current stress for the proposed controller with conventional PI and simple AI based techniques. It is observed that the proposed system has lower current stress than other two schemes. Convergence of multi-objective cost function is shown for the proposed technique compared to conventional PI and AI only based techniques in Fig. 6. The objective function decreases rapidly during the initial iterations and gradually approaches a stable value much earlier than other two techniques.
Thus, the convergence is achieved with a small number of iterations which demonstrates the computational suitability.
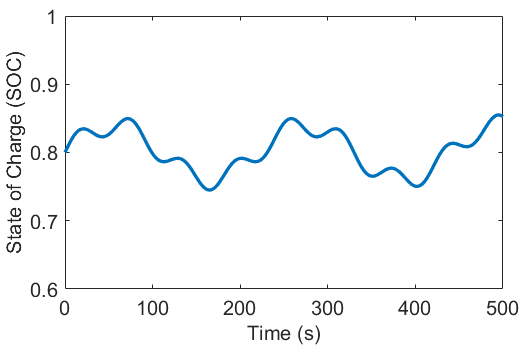
Fig. 7 shows battery SOC variation under fluctuating wind generation and load conditions with supervisory controller. The variation is small of +5-7% range which is suitable for supervisory controller system. The IoT system has an average communication latency of around 120 ms with reliable data transmission (>97% success rate). No significant degradation in control performance is observed due to communication delays since real-time control is locally employed.
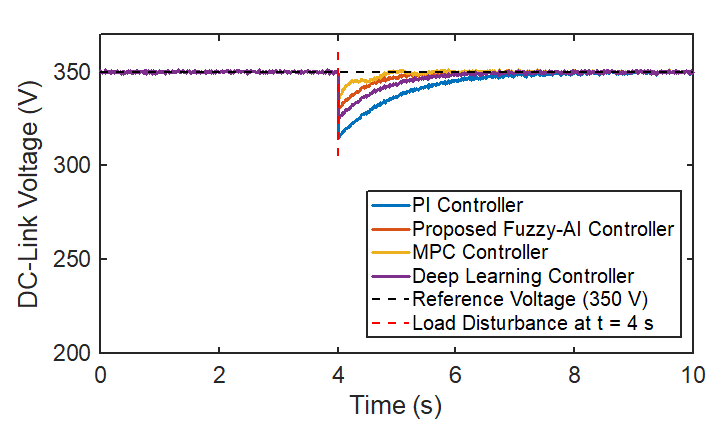
To provide a broader perspective on controller performance, a comparative simulative dynamic response study is conducted using representative control models to illustrate performance differences. These controller implementations are simplified dynamic approximations to capture their characteristic response behavior and not full-scale optimization or training-based implementation. Fig. 8 shows the comparative dynamic response of different controllers under a step change in load at 4s. The PI controller exhibits slower response with larger voltage deviation. The MPC-based control shows faster convergence. But it also introduces oscillatory behavior due to aggressive control action. The deep learning-based controller provides smoother response but with relatively slower settling time. The proposed controller achieves a balanced performance with reduced voltage deviation, faster settling time, and minimal oscillations. A comparative Table 2 is also added for comparison with advanced control strategies.
Control Method | Settling Time (s) | Voltage Overshoot (%) | Steady state Error (%) | Computational Complexity |
PI Controller | 4.2 | 8.7 | 2.5 | Low |
MPC Controller | 1.3 | 6.3 | 0.9 | High |
Deep Learning Control | 2.8 | 2.7 | 1.2 | Very high |
Proposed Fuzzy-AI Control | 1.5 | 2.5 | 0.7 | Medium |
The values presented in Table 2 are obtained from simulation-based dynamic response analysis under identical disturbances for all controllers. Minor variations are subjected to disturbance realization and noises.
The MPC controller exhibits fast response but introduces oscillatory behavior and higher computational burden. Deep learning control provides smooth response but suffer from slower adaptation and high training complexity. The proposed fuzzy-AI approach achieves a balance between performance and computational efficiency.
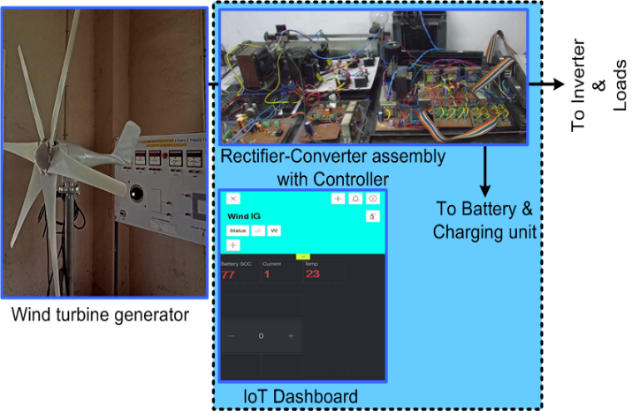
The experimental setup is shown in Fig. 9. Table 3 summarizes the experimental comparison with conventional and state-of-the-art techniques for voltage regulation. It is observed that the proposed system outperforms other techniques with lower voltage dip, better settling time during transients, lower error during steady state, and lower voltage ripple.
Control Methodology | Parameters | |||
Voltage | Settling Time (s) | Steady-State Error (%) | Voltage Ripple (%) | |
Conventional PI Controller | 38 | 4.2 | 2.6 | 3.6 |
Fuzzy Logic Controller | 27 | 3.7 | 1.7 | 2.4 |
ANN-Based Supervisory Controller | 24 | 2.2 | 1.1 | 2.1 |
Proposed Fuzzy- | 21 | 1.5 | 0.7 | 1.6 |
The battery energy stress management comparison is shown in Table 4. The reduced battery current indicates lower electrochemical stress and better battery life. This also implies that fuzzy and intelligent controllers reduce unnecessary battery activity.
Although validated at 1 kW scale, the proposed architecture is scalable due to its modular control structure. Similar control has already been extended to higher-capacity microgrids [7], which suggest applicability to larger systems.
The IoT-based monitoring system is evaluated in terms of communication latency, reliability, and impact on control performance. It is observed that the average data transmission latency using MQTT protocol is approximately 100-150 ms with standard Wi-Fi connection. Packet delivery success rate exceeded 97% during continuous operation. No significant degradation in DC-link voltage regulation or battery control performance is observed due to communication delays. This is because the real-time control loop is executed locally.
Control Method | RMS Battery Current (A) | SOC Variation (%) | Charge/Discharge Cycles (per hour) | Estimated Battery Stress |
PI Controller | 11.6 | 18 | 22 | High |
Fuzzy Logic Control | 9.2 | 14 | 17 | Medium |
AI Predictive Control | 8.3 | 11 | 15 | Medium-Low |
Proposed Fuzzy-AI Control | 7.2 | 8 | 11 | Low |
This paper presents a hybrid predictive fuzzy-AI supervisory controller for wind-battery microgrid. The proposed scheme integrates short-term wind power forecasting with fuzzy-based energy scheduling. The storage battery SOC is managed to improve battery health. Both simulation and experimental observations demonstrate improved voltage regulation, reduced battery stress, and smoother system dynamics compared with conventional controllers. The battery SOC is maintained with allowable variations of +5-7% range with better transient performance during change in loads and wind speeds.
Future work will focus on adaptive tuning of fuzzy membership functions. Battery ageing models will also be incorporated for long-term optimization.
Arunava Chatterjee, Hybrid Predictive Fuzzy-AI Energy Management with SOC-Constrained Optimization for Wind-Driven Microgrids