An Enhanced PID-Based Motion Control Framework for Autonomous Line-Following Robot
DOI:
https://doi.org/10.59247/jfsc.v4i1.368Keywords:
PID Control, Line-Following Control, ESP, Line-Following Robot, Low-Cost and Educational RobotAbstract
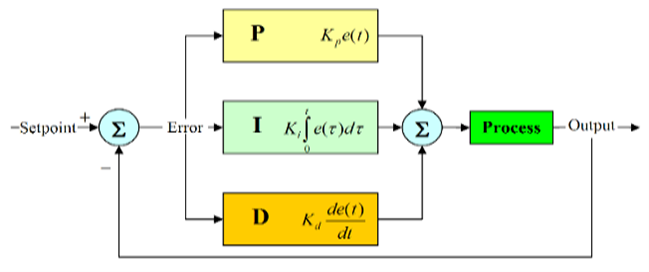
PID controller is widely used in automatic control systems because it is simple, reliable, and easy to apply. It is especially suitable for mobile robots, such as line-following robots. The main contribution of this work is an experimental method to tune PID parameters. Instead of using complex algorithms, the parameters are adjusted and tested directly on a real robot. This makes the method easier to apply, especially for low-cost and educational systems. Experiments were conducted to evaluate how PID parameters (Kp, Ki, and Kd) affect the robot’s performance. The robot was tested on different paths, including straight lines, curves, and 90-degree turns. The results show that the optimal parameters are Kp = 65, Ki = 0.1, and Kd = 13. With these values, the robot moves smoothly, responds quickly, and follows the path accurately.
References
N. Razmjooy, Z. Vahedi, V. V. Estrela, R. Padilha, and A. C. B. Monteiro, “Speed Control of a DC Motor Using PID controller based on improved whale optimization algorithm,” in Lecture Notes in Electrical Engineering, vol. 696, 2021, pp. 153–167, https://www.doi.org/10.1007/978-3-030-56689-0_8.
M. Y. Alwardat and P. V. Balabanov, “Speed control of DC motor using PID controller based on MATLAB,” Vestnik Tambovskogo Gosudarstvennogo Tehnicheskogo Universiteta, vol. 27, no. 2, pp. 195–202, 2021, https://www.doi.org/10.17277/vestnik.2021.02.pp.195-202.
A. Eskandari and R. Vatankhah, “Opposition-based particle swarm optimization-aided neural fractional order PID pitch control for variable pitch wind turbines,” International Journal of Dynamics and Control, vol. 13, no. 6, p. 216, 2025, https://www.doi.org/10.1007/s40435-025-01703-9.
A. Duque-Torres, C. Klammer, S. Fischer, R. Ramler, and D. Pfahl, “Metamorphic testing for optimisation: A case study on PID controller tuning,” Information and Software Technology, vol. 188, p. 107872, 2025, https://www.doi.org/10.1016/j.infsof.2025.107872.
P. T. M. S. Parvathy Thampi and G. Raghavendra, “Intelligent model for automating PID controller tuning for industrial water level control system,” in Proceedings - 2021 International Conference on Design Innovations for 3Cs Compute Communicate Control, ICDI3C 2021, pp. 149–155, 2021, https://www.doi.org/10.1109/ICDI3C53598.2021.00039.
T. Rakib and M. A. R. Sarkar, “Design and fabrication of an autonomous fire fighting robot with multisensory fire detection using PID controller,” in 2016 5th International Conference on Informatics, Electronics and Vision, ICIEV 2016, pp. 909–914, 2016, https://www.doi.org/10.1109/ICIEV.2016.7760132.
J. Te Shi, H. H. Gu, C. D. Shi, and T. Y. Ma, “PID control of medical centrifuge based on improved PSO-BP neural network,” in 2023 8th International Conference on Intelligent Computing and Signal Processing, ICSP 2023, pp. 831–834, 2023, https://www.doi.org/10.1109/ICSP58490.2023.10248482.
A. L. Salih, M. Moghavvemi, H. A. F. Mohamed, and K. S. Gaeid, “Modelling and PID controller design for a quadrotor unmanned air vehicle,” in 2010 IEEE International Conference on Automation, Quality and Testing, Robotics, AQTR 2010 - Proceedings, pp. 74–78, 2010, https://www.doi.org/10.1109/AQTR.2010.5520914.
K. H. Ang, G. Chong, and Y. Li, “PID control system analysis, design, and technology,” IEEE Transactions on Control Systems Technology, vol. 13, no. 4, pp. 559–576, 2005, https://www.doi.org/10.1109/TCST.2005.847331.
F. B. Rajshekhar, B. S. Kailash, K. N. Bibishan, and S. Heena, “Brainy Line Following Robot with Obstacle Detection,” International Journal of Advanced Research in Science, Communication and Technology, pp. 292–301, 2025, https://www.doi.org/10.48175/IJARSCT-29244.
A. Mohan, “Line-following robot for automatic delivery in classrooms or libraries,” Universal Research Reports, vol. 12, no. 3, pp. 93–103, 2025, https://www.doi.org/10.36676/urr.v12.i3.1588.
P. K. Mohanty and D. R. Parhi, “Navigation of an autonomous mobile robot using intelligent hybrid technique,” in Proceedings of 2012 IEEE International Conference on Advanced Communication Control and Computing Technologies, ICACCCT 2012, pp. 136–140, 2012, https://www.doi.org/10.1109/ICACCCT.2012.6320757.
G. Narvydas, R. Simutis, and V. Raudonis, “Autonomous mobile robot control using fuzzy logic and genetic algorithm,” in 2007 4th IEEE Workshop on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, IDAACS, pp. 460–464, 2007, https://www.doi.org/10.1109/IDAACS.2007.4488460.
W. Shi, L. Xu, S. Chen, and Y. Liang, “Path tracking for wheeled mobile robot based on adaptive robust control,” in Proceedings of the 31st Chinese Control and Decision Conference, CCDC 2019, pp. 3086–3091, 2019, https://www.doi.org/10.1109/CCDC.2019.8833456.
D. H. Kim, D. H. Hong, and J. I. Park, “Auto-tuning of reference model based PID controller using immune algorithm,” in Proceedings of the 2002 Congress on Evolutionary Computation, CEC 2002, pp. 483–488, 2002, https://www.doi.org/10.1109/CEC.2002.1006282.
H. J. Live, H. B. Wang, X. M. Zhu, Z. H. Shen, and J. Y. Chen, “Simulation research of fuzzy auto-tuning PID controller based on matlab,” in Proceedings - 2017 International Conference on Computer Technology, Electronics and Communication, ICCTEC 2017, pp. 180–183, 2017, https://www.doi.org/10.1109/ICCTEC.2017.00047.
L. Ye, “MATLAB Simulation of PID Control Algorithm,” Journal of Theory and Practice of Engineering Science, vol. 4, no. 03, pp. 28–45, 2024, https://www.doi.org/10.53469/jtpes.2024.04(03).06.
H. Jiang, “Overview and development of PID control,” Applied and Computational Engineering, vol. 66, no. 1, pp. 187–191, 2024, https://www.doi.org/10.54254/2755-2721/66/20240946.
I. P. Diva, “Simulation of fuzzy logic controller as direction adjustment for line following robot,” Jurnal Informatika dan Teknik Elektro Terapan, vol. 12, no. 3S1, 2024, https://www.doi.org/10.23960/jitet.v12i3s1.4590.
A. A. Al Barazi and E. Aykut, “Automated tuning of PID controllers using a generalized discrete PID structure with particle swarm optimization,” IEEE Access, vol. 13, pp. 185994–186013, 2025, https://www.doi.org/10.1109/ACCESS.2025.3625055.
D. Çelik, N. Khosravi, M. A. Khan, M. Waseem, and H. Ahmed, “Advancements in nonlinear PID controllers: A comprehensive review,” Computers and Electrical Engineering, vol. 129, pp. 1–43, 2026, https://www.doi.org/10.1016/j.compeleceng.2025.110775.
P. Teppa-Garran, G. Bohórquez, and G. Garcia, “Optimal tuning of PID-type controllers,” Journal of Applied Research and Technology, vol. 23, no. 2, pp. 145–154, 2025, https://www.doi.org/10.22201/icat.24486736e.2025.23.2.2470.
O. Jasim, “Design and implementation of a practical board for generating a PWM signal to control the speed and direction of a DC motor,” Journal of Research in Engineering and Computer Sciences, vol. 3, no. 03, pp. 01–08, 2025, https://www.doi.org/10.63002/jrecs.303.960.
A. Faroqi, M. A. Ramdhani, F. Frasetyio, and A. Fadhil, “dc motor speed controller design using pulse width modulation,” IOP Conference Series: Materials Science and Engineering, vol. 434, p. 012205, 2018, https://www.doi.org/10.1088/1757-899X/434/1/012205.
J. Sang, “Application of PID control,” Science and Technology of Engineering, Chemistry and Environmental Protection, vol. 1, no. 11, 2025, https://www.doi.org/10.61173/8c9hkg58.
S. Yamanoor, Introduction to the ESP32 Platform. Springer Books, 2025, https://www.doi.org/10.1007/979-8-8688-1570-6_1.
L. Chen, J. Zhang, and Y. Wang, “Wireless car control system based on Arduino Uno R3,” in 2018 2nd IEEE Advanced Information Management,Communicates,Electronic and Automation Control Conference (IMCEC), IEEE, pp. 1783–1787, 2018, https://www.doi.org/10.1109/IMCEC.2018.8469286.
D. N. David, D. Hamdani, and I. Setiawan, “Developing Physics Teaching Aids on Moment of Inertia Material using Arduino Nano and TCRT5000 Sensor,” Jurnal Ilmiah Pendidikan Fisika, vol. 7, no. 1, p. 10, 2023, https://www.doi.org/10.20527/jipf.v7i1.6889.
M. İ. Daşkın, E. Özkan, and K. B. Cihan, “Line follower robot with PID control,” 2024. https://www.doi.org/10.13140/RG.2.2.24983.89760.
Q. Ariyansyah and A. Ma’arif, “DC Motor Speed Control with Proportional Integral Derivative (PID) Control on the Prototype of a Mini-Submarine,” Journal of Fuzzy Systems and Control, vol. 1, no. 1, pp. 18–24, 2023, https://www.doi.org/10.59247/jfsc.v1i1.26.
F. Ben Aicha, “Optimized embedded AI: efficient implementation of CNNs on ESP32-CAM for real-time image classification,” Computing, vol. 107, no. 11, p. 206, 2025, https://www.doi.org/10.1007/s00607-025-01559-z.
S. K. Suman and V. K. Giri, “Speed control of DC motor using optimization techniques based PID Controller,” in Proceedings of 2nd IEEE International Conference on Engineering and Technology, ICETECH 2016, pp. 581–587, 2016, https://www.doi.org/10.1109/ICETECH.2016.7569318.
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Nguyen-Thanh-Loc Tran, Viet-Tien-Dung Bui, Hong-Nho Bui, Hoang-Nguyen Nguyen, Thi-Ngoc-Thao Nguyen, Thanh-Sang Nguyen, Hung-Ky Nguyen, Huynh-Duc-Anh Nguyen, Thanh-Binh Phan, Hoang-Sang Luong; Le-Minh-Tan Nguyen; Vo-Minh-Khoa Tran, Tien-Dat Nguyen, Huynh-Khanh-Nam Pham, Duc-Dat Nguyen, The-Nhan Nguyen

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
