Fault Tolerant Control of Robot Manipulator with Actuator Effectiveness Adaptation
DOI:
https://doi.org/10.59247/jfsc.v4i1.397Keywords:
Fault-Tolerant Control, Robot Manipulator, Actuator Fault, Adaptive Control, Torque ControlAbstract
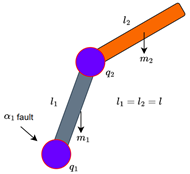
This study discusses the implementation of fault-tolerant control (FTC) for a planar two-degree-of-freedom (2DoF) robot manipulator experiencing actuator loss of effectiveness. Several methods have been proposed, such as PID and MRAC; however, their accuracy still needs improvement. Meanwhile, FT-SMC offers high accuracy, but its methodological complexity results in longer execution time and reduced computational efficiency. The objective of this research is to develop a fault-tolerant control method that can maintain system performance under actuator degradation while achieving high tracking accuracy with improved computational efficiency. Simulations are performed with a two-link manipulator model with sinusoidal reference trajectories. An actuator fault is introduced at 4 s by reducing the actuator effectiveness to [0.5, 0.7]ᵀ, meaning that the actuator capability decreases to 50% and 70% of its nominal performance, respectively. The simulation results show that the proposed FTC controller maintains good tracking performance after the fault occurs. In contrast, the controller without FTC experiences performance degradation characterized by phase lag and amplitude attenuation in the system response. Furthermore, the actuator effectiveness estimation mechanism demonstrates fast convergence after the fault occurs, with settling times of approximately 0.084 s and 0.238 s for the first and second joints, respectively. The steady-state MAEs are 0.0080 and 0.0395, equivalent to relative errors of 1.6% and 5.6%, respectively. Compared with other FTC methods, the proposed FTC controller also provides a balanced trade-off between tracking accuracy, robustness under fault conditions, and computational efficiency, making it suitable for real-time implementation.
References
A. Milecki and P. Nowak, “Review of Fault-Tolerant Control Systems Used in Robotic Manipulators,” Applied Sciences (Switzerland), vol. 13, no. 4, p. 2675, 2023, https://doi.org/10.3390/app13042675.
Z. Khan, A. Nasir, and S. Mekid, “Fault-tolerant control strategies for industrial robots: state of the art and future perspective on AI-based fault management,” Artificial Intelligence Review, vol. 58, no. 11, p. 362, Aug. 2025, https://doi.org/10.1007/s10462-025-11327-2.
M. Baioumy, C. Pezzato, R. Ferrari, C. H. Corbato, and N. Hawes, “Fault-tolerant control of robot manipulators with sensory faults using unbiased active inference,” in 2021 European Control Conference, ECC 2021, pp. 1119–1125, 2021, https://doi.org/10.23919/ECC54610.2021.9654913.
G. Zhang, H. Liu, Z. Qin, G. V. Moiseev, and J. Huo, “Research on Self-Recovery Control Algorithm of Quadruped Robot Fall Based on Reinforcement Learning,” Actuators, vol. 12, no. 3, p. 110, 2023, https://doi.org/10.3390/act12030110.
J. Lee, J. Hwangbo, L. Wellhausen, V. Koltun, and M. Hutter, “Learning quadrupedal locomotion over challenging terrain,” Science Robotics, vol. 5, no. 47, 2020, https://doi.org/10.1126/SCIROBOTICS.ABC5986.
Z. Dachang, H. Pengcheng, D. Baolin, and Z. Puchen, “Adaptive nonsingular terminal sliding mode control of robot manipulator based on contour error compensation,” Scientific Reports, vol. 13, no. 1, 2023, https://doi.org/10.1038/s41598-023-27633-0.
Y. Wang and M. Wang, “Adaptive Fault-Tolerant Sliding Mode Control Design for Robotic Manipulators with Uncertainties and Actuator Failures,” Symmetry, vol. 17, no. 9, p. 1547, 2025, https://doi.org/10.3390/sym17091547.
Q. D. Le and H. J. Kang, “Implementation of fault-tolerant control for a robot manipulator based on synchronous sliding mode control,” Applied Sciences (Switzerland), vol. 10, no. 7, p. 2534, 2020, https://doi.org/10.3390/app10072534.
J. Pan, L. Qu, and K. Peng, “Fault-Tolerant Control of Multi-Joint Robot Based on Fractional-Order Sliding Mode,” Applied Sciences (Switzerland), vol. 12, no. 23, p. 11908, 2022, https://doi.org/10.3390/app122311908.
S. M. Ebrahimi, F. Norouzi, H. Dastres, R. Faieghi, M. Naderi, and M. Malekzadeh, “Sensor fault detection and compensation with performance prescription for robotic manipulators,” Journal of the Franklin Institute, vol. 361, no. 7, p. 106742, 2024, https://doi.org/10.1016/j.jfranklin.2024.106742.
Z. Feng and G. Hu, “Formation Tracking of Multiagent Systems with Time-Varying Actuator Faults and Its Application to Task-Space Cooperative Tracking of Manipulators,” IEEE Transactions on Neural Networks and Learning Systems, vol. 34, no. 3, pp. 1156–1168, 2023, https://doi.org/10.1109/TNNLS.2021.3104987.
X. Zhang, Z. Yang, H. Liu, and X. Huang, “Optimal Sliding Mode Fault-Tolerant Control for Multiple Robotic Manipulators via Critic-Only Dynamic Programming,” Sensors, vol. 25, no. 17, p. 5410, 2025, https://doi.org/10.3390/s25175410.
Q. D. Le and E. Yang, “Adaptive Fault-Tolerant Tracking Control for Multi-Joint Robot Manipulators via Neural Network-Based Synchronization,” Sensors, vol. 24, no. 21, p. 6837, 2024, https://doi.org/10.3390/s24216837.
Y. Chen, J. Ding, Y. Chen, and D. Yan, “Nonlinear Robust Adaptive Control of Universal Manipulators Based on Desired Trajectory,” Applied Sciences (Switzerland), vol. 14, no. 5, p. 2219, 2024, https://doi.org/10.3390/app14052219.
I. Ali, M. Hassan, Z. Bano, E. Jawo, and M. M. A. Almazah, “Robust control of robot manipulator dynamics with two stages algorithm of optimal and integral sliding mode approaches,” Scientific Reports, vol. 15, no. 1, p. 36585, 2025, https://doi.org/10.1038/s41598-025-20478-9.
F. Zhang, W. Wu, R. Song, and C. Wang, “Dynamic learning-based fault tolerant control for robotic manipulators with actuator faults,” Journal of the Franklin Institute, vol. 360, no. 2, pp. 862–886, 2023, https://doi.org/10.1016/j.jfranklin.2022.11.044.
Z. Anjum, Z. Sun, S. Ahmed, and A. T. Azar, “Adaptive fixed-time fault-tolerant trajectory tracking control for disturbed robotic manipulator,” Plos One, vol. 20, no. 6, 2025, https://doi.org/10.1371/journal.pone.0323346.
S. F. A. Latip, A. R. Husain, M. N. Ahmad, and Z. Mohamed, “Fault tolerant control for sensor fault of a single-link flexible manipulator system,” Jurnal Teknologi, vol. 78, no. 6–13, pp. 59–66, 2016, https://doi.org/10.11113/jt.v78.9273.
Y. Ting, S. Tosunoglu, and D. Tesar, “Control structure for fault-tolerant operation of robotic manipulators,” in Proceedings - IEEE International Conference on Robotics and Automation, 1993, pp. 684–690, https://doi.org/10.1109/robot.1993.291826.
M. Van, S. S. Ge, and H. Ren, “Finite Time Fault Tolerant Control for Robot Manipulators Using Time Delay Estimation and Continuous Nonsingular Fast Terminal Sliding Mode Control,” IEEE Transactions on Cybernetics, vol. 47, no. 7, pp. 1681–1693, 2017, https://doi.org/10.1109/TCYB.2016.2555307.
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Anisa Ulya Darajat, Swadexi Istiqphara, Heriansyah, Mohammad Farhan Ferdous, Abu Saleh Musa Miah, Uri Arta Ramadhani, Hari Maghfiroh

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
