A Study of a Laser Engraving System Based on a Cartesian Robot with Image Processing
DOI:
https://doi.org/10.59247/jfsc.v4i1.361Keywords:
Laser Engraving, Cartesian Robot, Mitsubishi Q03UDE, PLC, Python, Image Processing, OpenCV, MC Protocol, Industrial AutomationAbstract
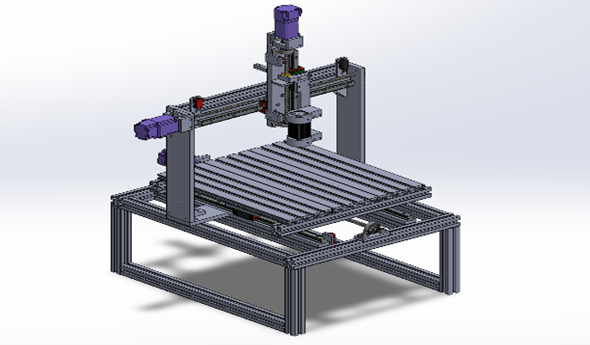
Traditional CNC laser engraving systems often face limitations in flexibility, requiring manual alignment and pre-defined G-code files. This paper proposes an advanced automated laser engraving system based on a 3-axis Cartesian robot that bridges the gap between industrial control reliability and modern computer vision. The core novelty of this research lies in the seamless integration of a Mitsubishi Q03UDE Programmable Logic Controller (PLC) with a Python-based image processing framework. By utilizing the OpenCV library for real-time edge detection and trajectory generation, the system can autonomously identify object positions and convert complex patterns into precise motion commands. Communication is established via the MC Protocol over Ethernet, ensuring high-speed data synchronization between the vision system and the servo-driven hardware. Experimental results demonstrate that the proposed system achieves high precision in engraving, significantly reduces setup time by eliminating manual calibration, and maintains the robust stability required for industrial environments. This approach provides a scalable solution for intelligent manufacturing and personalized production.
References
L. Li Da Xu Li, Eric L. Xu, and Li, “State of the Art and Future Trends,” International Journal of Production Research, vol. 56, no. 8, pp. 2941–2962, 2018, https://doi.org/10.1109/TII.2018.2828141.
A. Gasparetto and G. Rosati, “Design and Implementation of a Cartesian Robot,” in AMST’02 Advanced Manufacturing Systems and Technology, pp. 539–544, 2002, https://doi.org/10.1007/978-3-7091-2555-7_61.
J. Zhang, D. Cao, and Y. Wu, “Kinematic analysis and motion planning of cable-driven rehabilitation robots,” Applied Sciences (Switzerland), vol. 11, no. 21, 2021, https://doi.org/10.3390/app112110441.
L. Cao et al., “2 μm Passively Q-switched all-solid-state laser based on WSe2 saturable absorber,” Optics and Laser Technology, vol. 113, pp. 72–76, 2019, https://doi.org/10.1016/j.optlastec.2018.12.015.
I. G. S. M. Diyasa, A. Fauzi, M. Idhom, and A. Setiawan, “Multi-face Recognition for the Detection of Prisoners in Jail using a Modified Cascade Classifier and CNN,” Journal of Physics: Conference Series, vol. 1844, no. 1, p. 12005, 2021, https://doi.org/10.1088/1742-6596/1844/1/012005.
A. S. Shaikat, S. Akter, and U. Salma, “Computer Vision Based Industrial Robotic Arm for Sorting Objects by Color and Height,” Journal of Engineering Advancements, vol. 01, no. 04, pp. 116–122, 2020, https://doi.org/10.38032/jea.2020.04.002.
A. Pushpa Latha, R. Tharun Teja, B. Vamsi, P. Uha, P. Varshini, and M. Gnana Priya, “OpenCV-Enabled Real-Time Object Tracking Robotic Manipulator with Eye-Gaze Control for Assistive Applications,” International Journal of Emerging Research in Science, Engineering, and Management, vol. 2, no. 4, pp. 109–113, 2026, https://doi.org/10.58482/ijersem.v2i4.15.
Z. Jin and H. Yang, “Real time object tracking using deep learning and OpenCV,” Applied and Computational Engineering, vol. 35, no. 1, pp. 272–279, 2024, https://doi.org/10.54254/2755-2721/35/20230406.
N. F. Mohamad, A. R. Hidayu, A. A. Sherif, and A. S. A. K. Sharifah, “Characteristics of bituminous coal, sub-bituminous coal and bottom ash from a coal-fired power plant,” in BEIAC 2013 - 2013 IEEE Business Engineering and Industrial Applications Colloquium, pp. 571–573, 2013, https://doi.org/10.1109/BEIAC.2013.6560193.
L. Van Dai, N. N. Bon, and L. C. Quyen, “Deep Learning Method for Fault Diagnosis in High Voltage Transmission Lines: A Case of the Vietnam 220kV Transmission Line,” International Journal on Electrical Engineering and Informatics, vol. 14, no. 2, pp. 254–275, 2022, https://doi.org/10.15676/ijeei.2022.14.2.1.
Z. Zhaolei, M. Zhiqiang, and S. Lei, “The performance of typical QKD scheme under the condition of quantum measurement noise,” Journal of Physics: Conference Series, vol. 1634, no. 1, p. 12117, 2020, https://doi.org/10.1088/1742-6596/1634/1/012117.
H. Yoshida, Y. Hasegawa, M. Matsushima, T. Sugiyama, T. Kawabe, and M. Shikida, “Miniaturization of Respiratory Measurement System in Artificial Ventilator for Small Animal Experiments to Reduce Dead Space and Its Application to Lung Elasticity Evaluation,” Sensors, vol. 21, no. 15, p. 5123, 2021, https://doi.org/10.3390/s21155123.
C-Y. Lin and Y-C. Liu, “Precision tracking control and constraint handling of mechatronic servo systems using model predictive control,” IEEE/ASME Transactions on Mechatronics, vol. 17, no. 4, pp. 593–605, 2012, https://doi.org/10.1109/TMECH.2011.2111376.
P. Li, V. Marik, L. Gao, and W. Shen, “Editorial for the Special Issue on Intelligent Manufacturing,” Engineering, vol. 5, no. 4, pp. 595–596, 2019, https://doi.org/10.1016/j.eng.2019.07.004.
C. Sharma, S. K. Sharma, and D. Gill, “Holistic Smart Cities Viewed Through the Lens of Performance Evaluation Schemes,” in 3rd IEEE 2022 International Conference on Computing, Communication, and Intelligent Systems, ICCCIS 2022, pp. 983–989, 2022, https://doi.org/10.1109/ICCCIS56430.2022.10037622.
Z. H. Khan et al., “Development of a Low-Cost CNC Machine Laser Engraver,” in 2021 IEEE 12th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON),
IEEE, pp. 0376–0382, 2021, https://doi.org/10.1109/UEMCON53757.2021.9666661.
A. Patwardhan, A. Prakash, and R. G. Chittawadigi, “Kinematic Analysis and Development of Simulation Software for Nex Dexter Robotic Manipulator,” Procedia Computer Science, vol. 133, pp. 660–667, 2018, https://doi.org/10.1016/j.procs.2018.07.101.
Z. Liu, M. Li, D. Fu, and S. Zhang, “Design of intelligent controller for obstacle avoidance and navigation of electric patrol mobile robot based on PLC,” Scientific Reports, vol. 14, no. 1, p. 13476, 2024, https://doi.org/10.1038/s41598-024-63810-5.
E. A. Gyasi, A. Antila, P. Owusu-Ansah, P. Kah, and A. Salminen, “Prospects of Robot Laser Cutting in the Era of Industry 4.0,” World Journal of Engineering and Technology, vol. 10, no. 03, pp. 639–655, 2022, https://doi.org/10.4236/wjet.2022.103042.
R. Qi et al., “A new Cartesian cutting robot with laser height control system,” in 2011 IEEE International Conference on Mechatronics and Automation, ICMA 2011, pp. 2153–2158, 2011, https://doi.org/10.1109/ICMA.2011.5986314.
X. Xie, S. Ge, M. Xie, F. Hu, and N. Jiang, “An improved industrial sub-pixel edge detection algorithm based on coarse and precise location,” Journal of Ambient Intelligence and Humanized Computing, vol. 11, no. 5, pp. 2061–2070,2020, https://doi.org/10.1007/s12652-019-01232-2.
Y. Li, T. Huang, and D. G. Chetwynd, “An approach for smooth trajectory planning of high-speed pick-and-place parallel robots using quintic B-splines,” Mechanism and Machine Theory, vol. 126, pp. 479–490, 2018, https://doi.org/10.1016/j.mechmachtheory.2018.04.026.
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Thai-Duong Hoang, Manh-Dung Nguyen, Chi-Phat Pham, Thi-Ngoc-Thao Nguyen, Tan-Phat Nguyen, Anh-Son Tran, Quang-Thuan Le, Phuoc-Thinh Dang, Thai-Hiep Nguyen, Quang-Tung Trinh, Hoai-Bao-Nhan Nguyen, Huu-Nhan Nguyen, Thanh-Binh Nguyen

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
